Технические науки/10. Горное дело
Баранников А.Г.
Донецкий национальный технический университет
Применение бесконтактных систем идентификации подземных
работников угольных шахт для систем табельного учета
В настоящее время на большинстве угольных шахт
применяются автоматизированные системы табельного учета (АСТУ) с использованием
металлических жетонов, так называемых «ширялок», считывание которых
осуществляется контактным способом при помощи индуктивных считывающих
устройств. Однако низкий уровень надежности оборудования, обусловленный
контактным способом считывания и невозможность применения в системах
автоматической идентификации (позиционирования) рабочих является важным, и
основным их недостатком.
Решением данной проблемы является применение
бесконтактного способа считывания, основанного на технологии радиочастотной
идентификации RFID. Носителем информации о табельном номере рабочего в данной
технологии является радиочастотный идентификатор, не
имеющий собственного источника питания, работающий по так называемому
пассивному принципу. Энергию для своей
работы данный идентификатор получает из электромагнитного поля, излучаемого
антенной считывателя.
Основной проблемой, при работе RFID-системы, состоящей из
управляющего компьютера, считывателя и группы идентификаторов, является
коммуникация, включающая поочередную передачу данных считывателю группой
идентификаторов, находящихся в зоне опроса этого считывателя. Эту форму
коммуникации называют мультидоступом (Рис. 1).
Чтобы считыватель RFID-системы мог взаимодействовать
одновременно со многими транспондерами, принимая от них неискаженную
информацию, считыватель и транспондеры, должны быть спроектированы таким
образом, чтобы распознавать и устранять ситуацию, когда несколько транспондеров одновременно передают свои данные.
В противном случае
модулированные сигналы этих идентификаторов одновременно появятся на входе
считывателя и произойдет их взаимное искажение. Это явление называется
коллизией. При коллизии данных на входе считывателя последний не получит от
транспондеров никакой достоверной информации. Это особенно актуально, учитывая
пассивный способ считывания, потому как идентификаторы не имеют возможности
видеть друг друга.
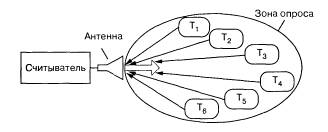
Рисунок 1 – Общая схема
взаимодействия считывателя и транспондеров
Для выделения и идентификации отдельного транспондера из
группы аналогичных устройств применяются различные антиколлизионные методы
мультидоступа. Различают четыре основных метода мультидоступа:
- с разделением в пространстве, использующие
определенный ресурс (пропускную способность канала) в пространственно
разделенных областях;
- с разделением по частоте, использующие методы,
в которых участникам коммуникации одновременно доступно несколько каналов
передачи на разных несущих частотах;
- с разделением по времени, использующие методы,
в которых вся доступная пропускная способность канала делится между участниками
во времени, так называемые вероятностные методы;
- с разделением по коду, которые основываются на
использовании радиочастотных меток, которые идентифицируются уникальным
порядковым номером, так называемые детерминированные методы.
Из всех вышеперечисленных методов антиколлизии, наиболее
широкое распространение в радиочастотной идентификации RFID, благодаря своей
надежности и простоты реализации, получили методы мультидоступа с разделением
по времени (вероятностные процедуры) и мультидоступа с разделением по коду
(детерминированные процедуры). На рис. 2 представлена краткая классификация
антиколлизионных протоколов радиочастотной идентификации и стандартов, которые
используют данные протоколы.

Рисунок
2 - Классификация антиколлизионных процедур
Для выявления наиболее подходящей антиколлизионной процедуры
было проведено сравнительное моделирование вероятностных и детерминированных
протоколов. Моделирование заключалось в оценке производительности процедур
мультидоступа в зависимости от скорости движения идентификаторов в зоне опроса
считывателя. Основным параметром производительности антиколлизионных является
время задержки идентификации, он определяет необходимое время, для
идентификации всех меток в радиусе действия считывателя.
Для более точного моделирования, были сделаны
следующие допущения:
- все протоколы используют один и то же набор
физических функций;
- все метки имеют одинаковые схемы модуляции;
- все метки имеют
одинаковый интервал времени для передачи своих ID-номеров.
- считыватель выполняет
только идентификацию меток, никаких дополнительных операций не производит.
Моделирование производилось в среде MatLab.
На рис. 3 представлены результаты моделирования для 500 идентификторов,
показывающие связь между количеством меток и временем, потраченном на их
идентификацию при условии неподвижности меток. На рис. 4 представлены
результаты моделирования для 5000 меток, при условии подвижности меток и использования
режима адаптивного состояния покоя, который не дает меткам выходить из
состояния покоя, если она уже была считана. Потому как, изначально, при входе
метки в зону опроса, она пассивна, и только получив достаточную энергию от
считывателя, она начинает передачу. Выход из состояния покоя производит
некоторую нежелательную задержку. Использование данного режима обусловлено
высокой скоростью движения меток при моделировании и сделано это для того,
чтобы показать максимальные возможности антиколлизионных процедур.
Если обобщить результаты моделирования, то можно
сказать, что детерминированные адаптивные антиколлизионные процедуры двоичного
поиска ABS показали лучшие результаты производительности как
статичных, так и подвижных идентификаторов. Независимо от скорости движения
меток, средняя производительность антиколлизионной процедуры ABS
составила около 200 меток
в секунду и при этом ей удалось
обработать около 37 меток,

Рисунок 3 – Общая задержка идентификации неподвижных меток
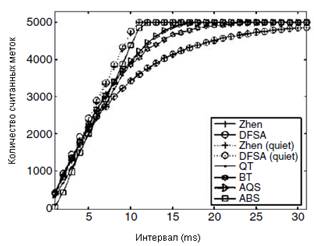
Рисунок 5 – Общая задержка идентификации подвижных меток
поступающих
в зону действия считывателя, что весьма достаточно для применения данного
протокола в системе идентификации подземных работников угольных шахт.
Принцип работы разрабатываемой системы
идентификации заключается в следующем (обобщенная структурная схема
представлена на рис. 6). Изначально, при приеме на работу, каждому работнику оформляется

Рисунок
6 – Обобщенная структурная схема системы идентификации
индивидуальная карточка-пропуск КП (id-номер карточки является табельным номером рабочего),
представляющие собой пассивные идентификаторы, встроенные в пластиковый корпус
карточки. КП необходима для идентификации рабочего, при процедуре выдачи ему
шахтного светильника в ламповой и переноса табельного номера с карточки-пропуск
на идентификатор И, закрепленный на аккумуляторной банке светильника. Данный
процесс заключается в следующем, рабочее место ламповщицы представлено тремя
считывателями: двумя считывателями КП «Выдача»/«Возврат» и считывателя
идентификаторов СИ. Рабочий передает
свою карточку ламповщице. Проверив по фотографии на карточке принадлежность ее
работнику, ламповщица приносит лампу и ставит ее под антенну СИ. Поднесением КП
к считывателю карточки-пропуска СКП «Выдача», ламповщица присваивает табельный
номер данного рабочего к идентификатору на лампе. После чего выдает работнику
лампу, карточка-пропуск остается в ламповой до окончания смены рабочего.
Аутентификация, т.е. проверка принадлежности рабочему доступа
предъявленного им идентификатора, происходит децентрализовано, при помощи
контроллера доступа КД. Это сделано для того, чтобы в случае обрыва линии
связи, вероятность чего в шахте выше, чем выход из строя КД, обеспечить
автономность работы системы идентификации. Считанные табельные номера, при этом
будут храниться в памяти КД, до тех пор, пока не восстановят связь с сервером
АСТУ. Считанные табельные номера
рабочих передаются по линиям связи, через конверторы интерфейсов КИ и
концентратор, на сервер АСТУ, находящийся в административном здании шахты.
Приложения, установленные на сервере, формируют базу данных и позволяют по
запросу оператора выдавать текущую информацию о численности и местоположении
рабочих.
Получив
светильник, рабочий направляется в околоствольный двор. На верхней посадочной площадке околоствольного двора,
установлена специальная считывающая арка, выполненная таким образом, чтобы через
нее смог пройти только один рабочий. Внутри арки установлен турникет
трипод, проходя через арку, рабочий проворачивает рычаги данного турникета. К
основе рычагов турникета подключен энкодер, который выполняет, в данном случае,
роль датчика оповещения ДО. По сигналу от ДО,
СИ выходит из режима ожидания, производит считывание идентификатора
рабочего. КД проводит аутентификацию и в случае
положительного результата, сигнализирует через световую сигнализацию
арки о правильности считывания табельного номера (зеленый индикатор – «Считано
верно», красный – «Ошибка идентификации»).
Далее рабочий направляется на участок, где установлена аналогичная арка и
процедура идентификации также аналогична. При
возврате светильника ламповщица подносит карточку-пропуск к СКП «Возврат», и
устанавливает светильник на зарядное место.
В заключении можно сказать, что
современный уровень техники создает все предпосылки угольщикам для замены
ручного табельного учета автоматизированным. Настоящая публикация посвящена
краткому изложению основ преодоления кризиса технологии автоматизации
табельного учета на угольных шахтах. Проведенное сравнительное моделирование
основных антиколлизионных процедур показало возможность применения существующих
протоколов мультидоступа RFID-систем
для табельного учета рабочих.
Литература
1. Электронная
идентификация. Бесконтактные электронные идентификаторы и смарт карты. /В.Л.
Джхунян, В.Н. Шаньгин. – М.: ООО «Издательство АСТ»: Издательство «НТ Пресс»,
2004. – 659.
2. Сандип Лихари. RFID.
Руководство по внедрению. Пер. с англ. – М.: КУДИЦ-ПРЕСС. – 2007. – 312 с.