Технические науки 11. Робототехника
П.О.Потапов* , к.т.н. Э.Г.Крылов**
*Московский
автомобильно-дорожный государственный
технический университет (МАДИ)
**Ижевский государственный технический университет имени
М.Т.Калашникова
Адаптивные
недоопределенные манипуляторы
Аннотация:
В статье приводится обзор различных схем недоопределенных адаптивных
манипуляторов. Адаптивность манипуляторов облегчает процесс управления ими, поскольку
они имеют приводов меньше, нежели степеней свободы. На основании классификации
манипуляторов и анализа особенностей их работы делается вывод, что наиболее
выгодное сочетание технических качеств имеет манипулятор с жесткими связями.
Ключевые слова:
манипулятор, рука, захват, адаптивность, недоопределенность.
Abstract: The article provides an overview of the various
schemes of underdetermined adaptive manipulators. Adaptability makes it easy to
control, because they have fewer actuators than degrees of freedom. Based on
the classification of manipulators and the analysis of their performance, the
conclusion is made that the most favorable combination of parameters has a
manipulator with rigid links.
Keywords: manipulator, hand, grasping, adaptability, underactuation.
Манипуляторы
используются для механизации производственных процессов (в частности, если
требуется многократное точное позиционирование), для работы в агрессивной
среде, в медицине при искусственном восстановлении утраченных конечностей человека.
При работе
манипуляторов одним из наиболее важных аспектов является реализация захвата
различных объектов в заданных условиях. Движение захвата может быть
организовано по заданному алгоритму (простой захват), альтернативой которому
может быть адаптивное движение захвата.
Простой захват широко
применяется в строительстве и на конвейерном производстве. Недостатком такого
захвата является невозможность адаптации к форме различных объектов. Этот
недостаток можно преодолеть при создании универсальной руки, снабженной
адаптивным захватом. Такое устройство приспособлено к захвату широкого круга
объектов без сложной системы управления, что в ряде практических применений
имеет большое значение. Манипуляторы, снабженные адаптивным захватом, имеют
число приводов, меньшее, чем количество степеней свободы, что придает им
свойство неопределённости. В англоязычной литературе системы, обладающие таким
свойством, называются underdetermined systems. Манипуляторы
рассматриваемого типа, работающие без сложной системы управления, могут
применяться для производственных процессов, в медицине, при искусственном
восстановлении утраченных конечностей человека или работе в агрессивной среде.
Подвижные части
адаптивного захвата (фаланги пальцев) огибают объект и самостоятельно приспосабливаются
к его форме, имея всего один привод без полноценного алгоритма управления. Для
создания геометрии устройства, расчета упругих элементов и рабочей зоны
механизма, наиболее часто механизм
рассматривают в статике. Пока палец зажимает объект, местоположение фаланг в
любое время определено контактом с внешними границами объекта. Когда объект
полностью охвачен, сила, приложенная приводом, распределяется между фалангами.
При имитации
человеческой руки пальцы манипулятора-протеза не имеют указанной выше выгодной
особенности (уменьшения количества приводов), поскольку они создают имитацию
движений пальца человека и не предусматривает самостоятельную адаптацию к
захватываемому объекту.
При проектировании
механизма манипулятора важно учитывать экономическую целесообразность, на
которую значительное влияние оказывает сложность конструкции, и,
соответственно, сложность и стоимость изготовления. Эффективный вариант
упрощения конструкции – создание манипулятора с меньшим количеством приводов,
нежели степеней свободы. Рассмотрим различные конструкции упрощенных
манипуляторов, а так же способы уменьшения количества приводов. На рисунке 1
показана классификация конструкций манипуляторов, обладающих свойствами
недоопределенности.

Рис. 1 Классификация недоопределенных манипуляторов
Применение манипуляторов с гибкими
связями (тросовыми системами) в основном ограничено малыми силами захвата.
Кроме этого, при их расчете и эксплуатации необходимо учитывать факторы трения
и податливости. Поэтому при работе с большими захватывающими силами
целесообразно использовать жесткие связи. [3, 4, 5].
Рис. 2 Манипулятор с гибкими связями
На рисунке 3 показан пример захвата
манипулятора, построенного на жестких связях.
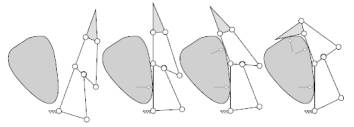
Рис. 3 Захват
манипулятора на жестких связях
Еще одним способом снижения количества
приводов является использование тормозов или муфты сцепления, в основном, для
последовательного управления всеми степенями подвижности имея только 1 привод,
см. рис. 4. Существующие системы такого типа отличаются между собой заданными
режимами работы и исполнением. Манипулятор может иметь вмонтированные в фаланги
датчики местоположения нажатия для обеспечения адаптивности. [1, 6, 7].
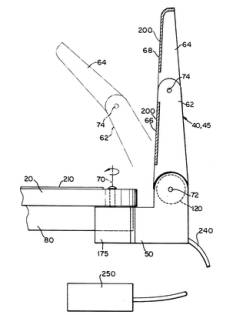
Рис. 4
Манипулятор с использованием муфт сцепления
Возможно также параллельное применение
различных коэффициентов податливости. Коэффициент
податливости показывает величину перемещения при действии силы, равной одному
ньютону, и имеет размерность мм/Н,
обратную коэффициенту жесткости (упругости). Можно снизить количество приводов введением коэффициента
податливости для каждой степени свободы. Каждый палец связан с общим приводом
через деформируемые пружины. Если один из пальцев остановился, другие движутся
в некотором диапазоне. Упругость пружины должна быть достаточно небольшой для
протекания адаптации. Таким образом, жесткость захвата такого типа имеет
ограничения.
Следующая
конструкция – размещение механизма захвата в фаланге, см. рис 5. При этом
происходит последовательная передача
усилия для движения фаланг пальцев.
Преимущества – легкое управление в режиме реального времени, хорошая адаптация,
маленький объём и вес, схожесть с пальцами человека во внешнем виде и размере.
Возможность персонификации при замене человеческой руки. Для выполнения любых
задач сила схватывания рук должна достигать определенного значения.
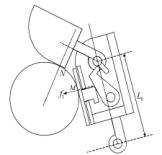
Рис. 5 Механизм захвата, размещенный в
фаланге
По нашему мнению, наиболее выгодным
соотношением технических качеств обладает манипулятор из жестких связей, потому
что не имеет ярко выраженных недостатков по сравнению с другими механизмами (в
частности, большого трения, низкой жесткости), его производство менее затратно,
и имеет меньшие ограничения по точности.
Рассмотрим более подробно устройство,
состоящее из жестких связей [9]. Процесс действия пальцев с двумя степенями
свободы показан на рисунке 6 для наглядности устройства, в котором приводов
меньше, нежели степеней свободы. Пальцы движимы нижним звеном конструкции
(стрелка на рисунке). Наличие двух степеней свободы и одного привода говорит о
том, что одну из степеней свободы «нейтрализует» пружина. В данном примере
пружина работает на растяжение и поддерживает фаланги в раскрытом положении.
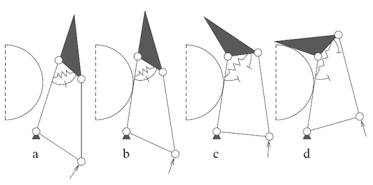
Рис.6 Последовательность положений звеньев при
захвате объекта
В предельных положениях фаланги держатся
выпрямленными под действием этой пружины, когда внешние силы не приложены к
фалангам. Следует отметить, что последовательность
захвата происходит при непрерывном движении привода. В позиции а палец находится в начальном положении
и растягивающие силы на пружину не действуют. Палец работает как однородное
тело при повороте вокруг шарнира – опоры. В положении b
ближайшая фаланга касается тела объекта. В положении c
вторая фаланга движется по отношении к первой – вдали от предельного положения
– и палец заканчивает движение на объекте, закрепляя его. В течение этой фазы
привод производит силу, необходимую для разжимания пружины. В итоге, положении d
обе фаланги лежат на объекте и палец завершает фазу адаптации по форме. Сила
привода распределяется между двумя фалангами, контактирующими с объектом.
После принятия принципиальной схемы
захвата манипулятора, показанной на рисунке 6, следующим этапом является
решение задач геометрического и динамического синтеза механизма, в процессе
которых подлежат определению геометрические параметры звеньев, их массовые и
жесткостные характеристики. Следующей стадией процесса проектирования явится
аналитическое и численное моделирование работы устройства. Отмеченные задачи
будут решены в процессе дальнейших исследований адаптивного недоопределенного
манипулятора на жестких связях.
Литература:
1.
Ulrich, N. Methods and apparatus for
mechanically intelligent grasping. Patent
US5501498 A, 1996.
2. Birglen, L,
Laliberté, T, Gosselin, C. Underactuated Robotic Hands. 2008 Springer,
242 p.
3. Crisman, J, Kanojia, Zeid, I. Graspar : A Flexible, Easily
Controllable Robotic Hand. IEEE Robotics
and Automation Magazine, pp. 32–38, June 1996.
4. Graham, D Artificial Hand and Digit Therefor. U.S. Patent 5 200 679, 1993.
5. Hirose, S, Umetani, Y. The Development of Soft Gripper for the
Versatile Robot Hand. Mechanism and
Machine Theory, Vol.13, pp. 351–359, 1978.
6. Ulrich, N, Kumar, V. Grasping Using Fingers with Coupled Joints. Proceedings of the ASME Mechanisms
Conference, Vol. 15-3, pp. 201–207, 1988.
7. Lee, S. Artificial Dexterous Hand. U.S. Patent 4 946 380, 1990.
8. Dechev, N., Cleghorn, W., Naumann, S. Multiple Finger, Passive
Adaptive Grasp Prosthetic Hand. Mechanism
and Machine Theory, Vol. 36, No. 10, pp. 1157–1173, 2001.
9. Zottola, M,
Ceccarelli, M. Underactuated Finger Mechanism for LARM Hand. Advances
on Theory and Practice of Robots and Manipulators, Vol. 22, pp 283-291 Springer International Publishing
Switzerland 2014.