Северо-Кавказский
горно-металлургический институт, Россия
ПРОЕКТИРОВАНИЕ АНАЛОГОВЫХ
ФАЗОАМПЛИТУДНЫХ ПРЕОБРАЗОВАТЕЛЕЙ ДЛЯ СИСТЕМ УПРАВЛЕНИЯ С ПОНИЖАЮЩИМ ИМПУЛЬСНЫМ
РЕГУЛЯТОРОМ НАПРЯЖЕНИЯ
В
состав современных систем управления входят разнообразные первичные
преобразователи информации (ППИ), каждый из которых выполняет вполне
определенную функцию. В число ППИ входят и фазовые преобразователи, которые
разделяются на аналоговые и цифровые. Оба вида фазовых преобразователей могут с
достаточно высокой эффективностью применяться в системах управления
технологическими процессами. В то же время, указанные преобразователи
отличаются между собой, а именно, техническими характеристиками, исполнением,
вопросами проектирования, реализации и эксплуатации. Рассмотрение этих вопросов
представляет собой большой труд, выполнить который в одной работе невозможно,
поэтому в предлагаемой работе рассматриваются только аналоговые фазовые преобразователи,
чаще всего называемыми аналоговыми фазоамплитудными преобразователями и то,
рассматриваются лишь особенности проектирования этих ППИ.
Известно,
что аналоговые фазоамплитудные преобразователи (далее - АФАП) обеспечивают преобразование угла
сдвига фаз между двумя синусоидальными сигналами одной частоты в амплитуду
постоянного напряжения [1, 2]. Значимость этих устройств, в первую
очередь, определяется тем, что угол
сдвига фаз между двумя синусоидальными сигналами одной частоты часто несет
богатейшую информацию о состоянии и о свойствах исследуемого или управляемого
объекта [3, 4]. Для получения этой информации через исследуемый объект
пропускается переменный электрический ток и измеряется задержка этого тока.
Задержка определяет собой угол сдвига фаз между сигналом на входе объекта и
сигналом на его выходе. Величина угла определяется электрическими свойствами
объекта и один из путей измерения его основывается на преобразовании этого угла
в унифицированный сигнал постоянного тока на основе АФАП. Отмеченное и
позволяет утверждать, что АФАП могут применяться в качестве ППИ в АСУ ТП и,
вообще, в системах управления, используемых для автоматизации различных
технологических процессов в промышленном производстве. АФАП также применимы с целью
повышения информационных свойств и возможностей систем автоматизации научных
исследований в области естественных наук и пр. [4].
Даже
краткий анализ аналогов АФАП показывает необходимость дальнейшего
совершенствования последних и важность разработки АФАП с улучшенными
характеристиками. Понятно, что это наиболее вероятно на основе новых принципов
проектирования АФАП. Таким образом, настоящая работа, посвященная этим принципам, обеспечивающим построение АФАП с
улучшенными свойствами и возможностями, является актуальной работой.
Для значимого сокращения аппаратурных затрат
и повышения характеристик АФАП целесообразнее всего использование в схеме АФАП
операционных усилителей, в связи с чем часть схемы АФАП, как будет показано
ниже, разработана на базе операционных усилителей. Эта часть схемы АФАП
обеспечивает решение подзадачи, связанной с преобразованием угла сдвига фаз
сигналов в длительность импульса. Решение же подзадачи преобразования
длительности импульса, пропорционального углу сдвига фаз, в амплитуду
постоянного напряжения предлагается здесь на основе понижающего импульсного
регулятора постоянного напряжения (ПИРН). Одновременно ПИРН предложен с целью
формирования широкого спектра значений амплитуд постоянного напряжения (это
существенно повышает качество автоматизации многих технологических процессов) и
с целью улучшения нагрузочных способностей АФАП.
Важно
отметить, что результативность проектирования АФАП во многом зависит от
алгоритма проектирования, поэтому в работе приведена блок-схема алгоритма на
рис. 1, на основе которого была разработана схема АФАП. Не приводя результатов
анализа возможностей предложенного алгоритма и возможностей реализации его
этапов, в тексте работы рассмотрены лишь отдельные аспекты проектирования АФАП.
Так
как угол сдвига фаз между двумя синусоидальными сигналами одной частоты проще
определять на основе прямоугольных импульсов, то в число первоначальных
процедур проектирования включена процедура, предусматривающая преобразование
входных синусоидальных сигналов в прямоугольные импульсы. Остальные процедуры и
шаги алгоритма проектирования легко видны из рис. 1.
Принципы
преобразования угла сдвига фаз между двумя синусоидальными сигналами в
напряжение иллюстрируются схемой АФАП, разработанной автором и приведенной на рис. 2. Так рис. 2 (участок 1) показывает
применение инвертирующих усилителей DA1 и DA2,
выполненных на основе операционных усилителей с глубокой обратной связи, для
преобразования двух входных синусоидальных сигналов в прямоугольные импульсы.
Соотношением сопротивлений R2/R1 и
R4/R3 добивается необходимое
усиление усилителей DA1 и DA2. В результате усиления
на выходах DA1 и DA2 формируются
прямоугольные импульсы с амплитудой, равной напряжению источника питания DA1
и DA2.
Проверка
выполнения задачи
проектирования
Рис. 1. Блок-схема алгоритма проектирования АФАП с
понижающим импульсным регулятором постоянного напряжения
Формирование
прямоугольных импульсов с длительностью,
пропорциональной фазовому сдвигу между прямоугольными импульсами с
выходов DA1 и DA2, осуществлено
применением дифференциального усилителя DA3, показанного на
участке 2 рис. 2. В усилителе DA3, построенного также на
основе операционного усилителя, подбором резисторов R5…R8
обеспечиваются единичные коэффициенты усиления по входам DA3.
Мостовой
выпрямитель (МВ), приведенный на участке 3 рис. 2, формирует импульсы одной полярности. Длительность t
этих импульсов пропорциональна углу
сдвига фаз Δφ синусоидальных сигналов на входе АФАП. Поэтому
справедлива функция - t=f(Δφ). В работе показана возможность использования этих
импульсов для реализации широтно-импульсной модуляции (ШИМ) и возможность
преобразования Δφ в амплитуду постоянного напряжения в результате
использования в оконечном каскаде преобразователя ПИР, приведенного на участке
4 рис. 2 [5].
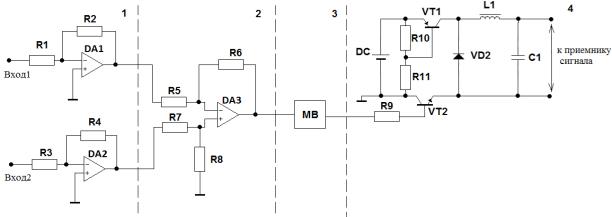
Рис.2.
Схема АФАП с мостовым выпрямителем и
понижающим импульсным регулятором напряжения
На
управляющий элемент ПИР подаются выходные импульсы МВ с длительностями,
пропорциональными углу сдвига фаз сигналов, подаваемых на входы АФАП. В
результате на выходе ПИР, а значит на выходе АФАП, формируется сигнал,
соответствующий углу сдвига фаз сигналов, т.е. ПИР реализует функцию: U= f(Δφ, UDC1), где UDC1 – напряжения источника питания ПИР. Отсюда следует, что одна из функций
используемого ПИРН - преобразование длительности прямоугольных импульсов в
унифицированные сигналы постоянного напряжения.
Возможно применение на
выходе ПИРН фильтров, к примеру, фильтра типа LC. Такой фильтр и показан
на рис. 2 [5]. Понятно, что применение фильтра определяется необходимостью
исключения остаточных пульсаций.
Основными элементами
ПИРН, как видно из рис. 2, являются: источник питания DC; регулирующие
ключи, реализованные на основе транзисторов VT1, VT2; катушка индуктивности L1;
конденсатор C1; диод VD1; резисторы R9…R11.
Алгоритм работы АФАП
включает в себя следующие процедуры:
- прием от объекта
контроля или управления сигналов синусоидальной формы одинаковой частоты, но
отличающихся друг от друга по фазе;
- усиление и
преобразование принятых сигналов в импульсы прямоугольной формы;
- реализация функции
формирования импульсов с длительностью, соответствующей величине угла сдвига
фаз, на основе прямоугольных импульсов и выпрямление этих импульсов;
- подача однополярных
импульсов на вход ПИРН;
- формирование на выходе
ПИРН напряжений постоянного тока с амплитудами, пропорциональными углам сдвига
фаз между сигналами на входе АФАП.
Последний
шаг алгоритма связан с созданием сигналов управления с унифицированными
значениями. Диапазон изменения этих сигналов (имеющих разные значения), как
следует из выше отмеченного, определяется значением напряжения питания ПИР.
Отметим то, что широкий диапазон этих сигналов предопределяет рост популярности
АФАП и повышение их значимости для систем управления.
В заключении важно
подчеркнуть, что разработанное устройство по сравнению с аналогами отличается
большей точностью, более широким диапазоном преобразования углов сдвига фаз,
меньшими габаритными размерами, большей экономичностью.
Работа должна вызвать
интерес у научных работников, студентов и аспирантов, занимающихся
проектированием автоматизированных систем управления как для научных
исследований, так и для промышленного производства.
Литература
1. Раннев
Г.Г. Методы и средства измерений: Учебник для вузов / Г.Г. Раннев, А.П.
Тарасенко. – 2-е изд., стереотип. – М.: Издательский центр «Академия», 2004. –
336 с.
2. Ратхор Т.С. Цифровые измерения. АЦП/ЦАП. Москва, Техносфера, 2006. –392 с.
3. Хасцаев Б.Д., Мустафаев Г.А. Повышение
точности и достоверности контроля в ТП производства изделий микроэлектроники //
Известия КБГУ. Вып.1. 2012.
4. Хасцаев Б.Д., Хасцаев М.Б. Применение
информационных свойств электрического импеданса биообъектов в медицине и
биологии. Изд-во: LAMBERT Academia Publishing, Германия, 2013. 98 с.
5. Розанов Ю.К., Рябчицкий М.В., Кваснюк А.А.
Силовая электроника: учебник для вузов.
2-е изд., стереотипное -
М.: Издательский дом МЭИ. 2009. - 612
с.: ил.