К.т.н.
Никитин В.С., Белов Р.Б.
ООО
«Научно-производственное предприятие «Тензосенсор», Россия
РОБОТИЗИРОВАННЫЙ
КОМПЛЕКС ДЛЯ ТУШЕНИЯ ЛЕСНЫХ ПОЖАРОВ
По данным Центра пожарной статистики
Международной ассоциации пожарных и спасательных служб ежегодно регистрируется
3,1 – 4,5 млн. пожаров, при которых погибает от 20 до 60 тыс. человек. По числу
пожаров лидирует США, где ежегодно регистрируют 1,2 – 1,4 млн. пожаров. По
числу погибших лидируют Индия, Пакистан и Россия, где число жертв ежегодно
составляет от 10 до 20 тыс. человек. Оценка ущерба от лесных пожаров в России
показывает, что ежегодно страна теряет от лесных пожаров от 20 до 111
миллиардов рублей.
Ежегодно на планете возникает 200 тысяч
лесных пожаров. По данным Greenpeace мировой показатель среднегодовой потери
леса составляет порядка 1,47 млн. га или 0,5 процента его площади.
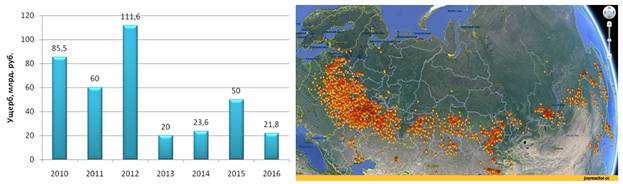
Рисунок 1 – Масштаб ущерба России
от лесных пожаров в период 2010 – 2016 гг.
При лесных пожарах совокупный ущерб,
наносимый реальному сектору экономики, состоит из многих компонентов:
-
гибель людей, в том числе и пожарных,
участвующих в тушении леса;
-
уничтожение производственных зданий и
сооружений, жилых построек;
-
повреждение и выход из строя техники, в
том числе пожарной при тушении лесных пожаров и пр.
-
гибель диких, в том числе редких
животных;
-
повреждение и уничтожение ценных пород
древесины, в том числе деловой;
-
пагубное влияние на возобновление
ресурсов леса;
-
ухудшение состояния водных бассейнов;
-
сжигание атмосферного кислорода;
-
химическое и тепловое загрязнение
атмосферы.
Робототехника для тушения лесных пожаров
разрабатывается и эксплуатируется в различных государствах мира (Германия,
Австралия, Швеция, Япония и др. страны.) В России разработкой, созданием и
внедрением пожарных роботов занимаются ФГУ ВНИИПО МЧС России, НПО «Инженерный
центр пожарной робототехники «ЭФЭР», МГТУ им. Баумана, Университет комплексных
систем безопасности. Проблема роботизации тушения лесных
пожаров достаточно актуальна.
Специалисты НПП «Тензосенсор» выполняют
проект по разработке и исследованию не имеющего аналогов высокоэффективного
роботизированного комплекса для тушения лесных пожаров, состоящего из набора
специализированных функционально взаимодополняющих разнородных роботизированных
наземных элементов и дрона для разведки и наблюдения за работой
роботизированного комплекса. Управление комплексом производится с подвижного
пункта управления.
Научная новизна разрабатываемого
комплекса заключается в следующем.
1. Дифференцированная функциональность и
мультиагентность. Все ранее созданные пожарные комплексы представляют собой
самоходное телеуправляемое устройство, оснащенное комплексом различных
инструментов. Как правило, это пожарный лафет, отвал, манипулятор и
лебедка. При выполнении какой либо одной
операции все остальные рабочие органы бездействуют.
В то же время, лесной пожар сложное
комплексное явление, эффективное тушение которого возможно только путем
применения множества роботизированных машин, работающих одновременно, но
выполняющих разные функции и взаимодополняющие друг друга.
2. Новый состав комплекса. В
разрабатываемом комплексе роботизированные шасси выполняют дифференцированные
функции, т.е. оснащены различными средствами для решения комплекса задач по
тушению лесного пожара и блокированию его распространения. Это позволяет повысить
эффективность использования рабочих органов, упростить и удешевить конструкцию
роботов. Таких согласованно работающих роботизированных мультиагентных
комплексов ранее не создавалось, поэтому мы ожидаем получение прорывных
результатов в области тушения лесных пожаров.
3. Мультиагентная
система управления. Для управления роботизированным комплексом впервые
используется мультиагентная система дистанционного управления, построенная по
иерархическому принципу с возможностью контроля работы операторов роботов на
двух уровнях контроля – супервайзера и бригадира.
Мультиагентная система дистанционного
управления будет обеспечивать возможность взаимодействия операторов,
бригадиров, супервайзеров и элементов беспилотной техники роботизированного
комплекса для тушения лесных пожаров, а также контроль процессов управления и
коммуникации.
4. Новый
унифицированный интерфейс управления. Использование компактных унифицированных
человеко-машинных интерфейсов на основе полиджойстиков и маски виртуальной
реальности, которые по отношению функциональности к весу многократно
превосходят все известные средства управления роботами. Применение новых
интерфейсов позволяет создавать компактные подвижные пункты управления, в
которых все операторы, управляющие роботами, размещаются в автомобилях, находящихся
на достаточном удалении от пожара, что обеспечивает высокую безопасность
персонала, участвующего в тушении лесного пожара.

Рисунок 3 – Унифицированный
интерфейс управления
5. Огне-пожарозащита
видеосистем. В разработке впервые будет использована оригинальная система
огне-пожарозащиты видеосистем роботов. Обычные видеосистемы роботов очень
уязвимы к действию копоти, грязи и механических факторов, возникающих при
тушении пожаров и быстро выводящих их из строя. Система будет обеспечивать
удаление с оптических и видеосистем роботов копоти, грязи и мелких механических
загрязнений, которые могут попасть на
них в ходе тушения пожара, а также охлаждение внешней поверхности
оптических систем при интенсивном тепловом воздействии на них от пожара.
Исследования проводятся
при финансовой поддержке государства в лице Минобрнауки России в
рамках выполнения Соглашения от 26 сентября 2017 г. № 14.579.21.0151.
Уникальный идентификатор прикладных научных исследований и экспериментальных
разработок RFMEFI57917X0151.