Докукова Н.А., Кафтайкина Е.Н., Конон Н.П.
Белорусский государственный университет
О СИНХРОННЫХ КОЛЕБАНИЯХ МНОГОЭЛЕМЕНТНЫХ ЛИНЕЙНЫХ ДИНАМИЧЕСКИХ СИСТЕМ
В научной литературе синхронизацией [1, 2]
называют подстройку ритмов автоколебательных систем за счет слабого
взаимодействия между ними. Объяснение этого процесса влияния связи оказалось
очень непростым и в настоящее время не завершено. В этом явлении не совсем ясны
механизмы проявления тех или иных особенностей взаимовлияния колебаний
осциллирующих систем, иногда имеющих различную природу, например, в часах,
лазерах, электронных генераторах, биологических материях.
В работе представлена общая линейная динамическая модель на рисунке 1 колебаний
произвольного числа одинаковых элементов n - автономных
осцилляторов, имеющих общую связь, записаны уравнения движения (1), исследованы
особенности и закономерности в представленных математических моделях (1)-(6),
изучено поведение объектов при соответствующем изменении параметров и начальных
условий (10), (11), получены точные аналитические формулы (5), (6) и в таблице 1 колебательных режимов всех
тел, по методике, развитой авторами в [3, 5], проведены численно-аналитические расчеты. Результаты
сопоставлены с экспериментальными данными, широко известными в литературе [1, 2].
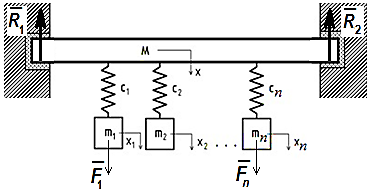
Рисунок 1 - Схема колебаний n - осцилляторов на
закрепленной балке
Система уравнений движения механической
системы на рисунке 1 в матричной форме примет вид:
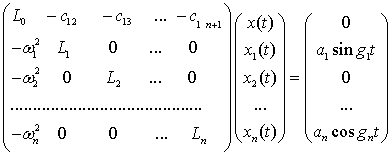 , (1)
, (1)
с начальными условиями
![]() ,
,
![]() , (2)
, (2)
![]() ,
,
![]() . (3)
. (3)
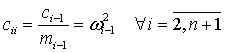
Здесь ![]() ,
, ![]() −
дифференциальные операторы по параметру времени t ; cij – коэффициенты
упругих элементов cj-1, отнесенных к соответствующим массам
mi-1
−
дифференциальные операторы по параметру времени t ; cij – коэффициенты
упругих элементов cj-1, отнесенных к соответствующим массам
mi-1 ![]() ,
,  ;
; ![]() , b – коэффициент вязкого сопротивления
колебаниям балки;
, b – коэффициент вязкого сопротивления
колебаниям балки; ![]() – вектор искомых
перемещений масс на рисунке 1;
– вектор искомых
перемещений масс на рисунке 1; ![]() – вектор
виброускорений нагрузочного режима, а1 =
– вектор
виброускорений нагрузочного режима, а1 = ![]() /m1 , аn =
/m1 , аn = ![]() /mn ;
/mn ; ![]() и
и ![]() – гармонические силы, являющиеся внешними и приложены к первому
и последнему автономным осцилляторам;
– гармонические силы, являющиеся внешними и приложены к первому
и последнему автономным осцилляторам; ![]() и
и ![]() – силы линейного трения и упругого «винклеровского»
основания в опорах балки
– силы линейного трения и упругого «винклеровского»
основания в опорах балки ![]() .
Общая сила
.
Общая сила ![]() - консервативная, сила линейного
трения в балке, неконсервативная сила вязкого сопротивления колебаниям -
- консервативная, сила линейного
трения в балке, неконсервативная сила вязкого сопротивления колебаниям - ![]() .
.
Характеристическое уравнение примет
вид
 , (4)
, (4)
если парциальные
частоты всех n - линейных осцилляторов одинаковы ![]() . Для простоты положим
b = 0 . Тогда решения многоэлементной задачи приводятся к следующим колебательным
режимам
. Для простоты положим
b = 0 . Тогда решения многоэлементной задачи приводятся к следующим колебательным
режимам
 (5)
(5)

где l1=w1,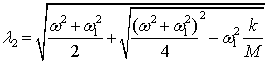 ,
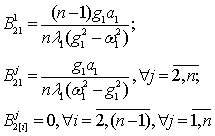
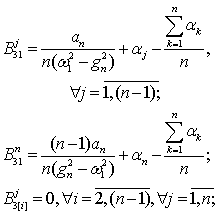
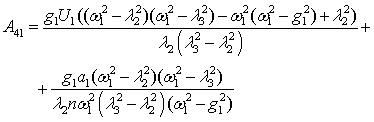
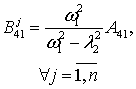
, . Неопределенные коэффициенты соответствующих решений
находятся по методике, развитой в [3], аналитические формулы для которых сведены в таблицу 1.
. Неопределенные коэффициенты соответствующих решений
находятся по методике, развитой в [3], аналитические формулы для которых сведены в таблицу 1.
Таблица
1
|
Номер группы
коэффициентов |
Коэффициенты перемещения балки x(t) |
Коэффициенты перемещений
автономных осцилляторов xj(t), |
|
1 |
2 |
3 |
|
1 |
|
|
|
|
|
|
|
2 |
|
|
|
3 |
|
|
|
4 |
|
|
|
|
|
|
|
5 |
|
|
|
U2 = 0 |
|
|
|
6 |
W1 = 0 |
|
|
|
|

Если положить n
= 2 , с12 = с13
, a1 = a2 = b = k = 0 и выбрать в качестве
начальных условий следующие: a1 = g
, a2 = d , то получаются аналитические
формулы решений, полностью совпадающие с
перемещениями в [5].
В качестве
примера рассмотрим механизм с произвольными физическими параметрами: n = 4,
M = 15.0 кг, m1 = m2 = m3 =
m4 = 1.0 кг, c1 = c2 = c3 = c4 = 55.0 н/м, k = 20.0
н/м, a1 = -0.02 м, a2 = 0.09 м, a3 = -0.07 м, a4 = 0.05 м,
g1 = 5pрад/с,
gN = 16.6p рад/с, F1 = 3.2 н, FN = 11.5 н, a1 = F1/m1= 3.2 м/с2,
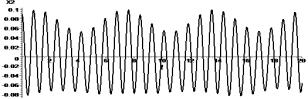
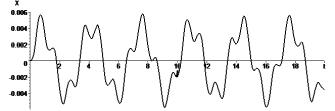
aN=FN/mN=11.5 м/с2, w =4.0 рад/с, w1 = 7.416 рад/с, l1= 7.416 рад/с, l2 = 8.364 рад/с, l3 = 1.024 рад/с, z1 = zN = 3.67 (рад/с)2. Перемещения представлены на графиках рисунка
2 и на основании формул (5), (6) и таблицы 1 примут вид:
x(t) = 0.0106 sin(1.02t)+0.00289 cos(1.02t)-0.00181 sin(8.36t)-0.00289cos(8.36t)+
+0.00027 sin(15.7t)+0.00000585 cos(52.2t), (10)
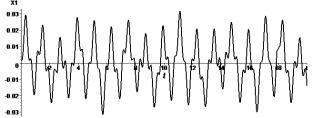
x1(t) = 0.0108 sin(1.02t)+0.00294
cos(1.02t)+0.0265 sin(7.42t)-0.0336 cos(7.42t)+
+0.00665 sin(8.36t)+0.0106
cos(8.36t)-0.0168 sin(15.7t)-0.000000121
cos(52.2t),
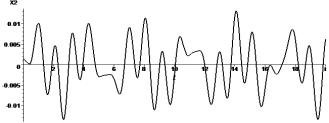
x2(t) = 0.0108 sin(1.02t)+0.00294 cos(1.02t)-0.00884 sin(7.42t)+0.0764 cos(7.42t)+
+0.00665 sin(8.36t)+0.0106 cos(8.36t)-0.0000775 sin(15.7t)-0.000000121
cos(52.2t),
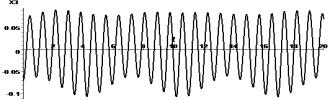
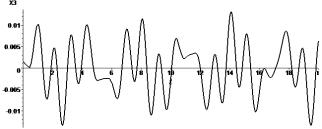
x3(t) = 0.0108 sin(1.02t)+0.00294 cos(1.02t)-0.00884 sin(7.42t)-0.0836
cos(7.42t)+
+0.00665 sin(8.36t)+0.0106 cos(8.36t)-0.0000775 sin(15.7t)-0.000000121
cos(52.2t),
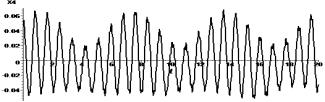
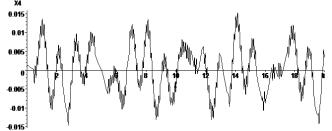
x4(t) = 0.0108 sin(1.02t)+0.00294 cos(1.02t)-0.00884 sin(7.42t)+0.0407 cos(7.42t)+
+0.00665 sin(8.36t)+0.0106 cos(8.36t)-0.0000775
sin(15.7t)-0.00432 cos(52.2t).
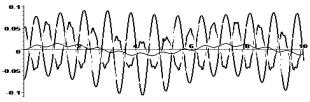
На рисунке 2 е наблюдается некоторое
рассогласование по фазам колебаний гармонических осцилляторов и явное отличие
по амплитудам. Более синхронизированной данная система станет, если в формулах
таблицы 1 положить все начальные условия
aj, j = ![]() одинаковыми. Например, aj = 0.0015 м, j =
одинаковыми. Например, aj = 0.0015 м, j = ![]() , n=4, M=20.0 кг, m1=m2=m3=m4=
2.0 кг, c1=c2=c3=c4= 55.0 н/м, k= 100.0
н/м,
, n=4, M=20.0 кг, m1=m2=m3=m4=
2.0 кг, c1=c2=c3=c4= 55.0 н/м, k= 100.0
н/м,
g1= 5p рад/с,
gN = 16.6p рад/с, F1= 3.2 н, FN = 11.5 н, a1=F1/m1= 1.6 м/с2,
aN =FN/mN = 5.75 м/с2, w= 4.0 рад/с, w1= 5.244 рад/с, l1= 5.244 рад/с,
l2=
6.33 рад/с, l3= 1.852 рад/с, z1=zN = 2.75 (рад/с)2.
а) б)
в) г)
д) е)
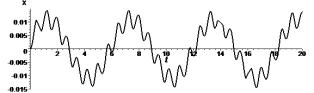
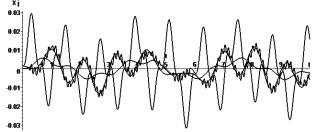
Рисунок 2 -
Перемещения x(t) на а, xj(t) , j = ![]() на б, в,
г, д, все вместе на е, для динамической
системы, состоящей из n = 4 одинаковых осцилляторов, обладающих разными
начальными условиями
на б, в,
г, д, все вместе на е, для динамической
системы, состоящей из n = 4 одинаковых осцилляторов, обладающих разными
начальными условиями
На основании
формул (2), (3), (5), (6), таблицы 1 и представленных расчетов можно сделать
вывод о том, что синхронными будут колебания внутренних элементов механической
системы с одинаковыми отклонениями масс m j в начальный момент времени aj = a0, j
= ![]() . Это очевидно проиллюстрировано на графиках рисунка 3в,г.
На последнем графике 3 е
два колебательных режима x2(t) и x3(t) полностью совпали в соответствии с полученными формулами:
. Это очевидно проиллюстрировано на графиках рисунка 3в,г.
На последнем графике 3 е
два колебательных режима x2(t) и x3(t) полностью совпали в соответствии с полученными формулами:
x(t) = 0.00419 sin(1.85t)+0.000609 cos(1.85t)-0.00144 sin(6.33t)-
-0.000611 cos(6.33t)+0.0000875 sin(15.7t)+0.00000217
cos(52.2t), (11)
x1(t) = 0.00478 sin(1.85t)+0.000696 cos(1.85t)+0.0164
sin(5.24t)-0.000534 cos(5.24t)+
+0.00316 sin(6.33t)+0.00134
cos(6.33t)-0.00731 sin(15.7t)-0.0000000222
cos(52.2t),
x2(t)=0.00478sin(1.85t)+0.000696cos(1.85t)-0.00547sin(5.24t)-0.000534 cos(5.24t)+
+0.00316sin(6.33t)+0.00134cos(6.33t)-0.0000110sin(15.7t)-0.0000000222cos(52.2t),
x3(t) = 0.00478sin(1.85t)+0.000696cos(1.85t)-0.00547sin(5.24t)-0.000534 cos(5.24t)+
+0.00316sin(6.33t)+0.00134cos(6.33t)-0.0000110sin(15.7t)-0.0000000222cos(52.2t),
x4(t) = 0.00478 sin(1.85t)+0.000696 cos(1.85t)-0.00547 sin(5.24t)+0.00160cos(5.24t)+
+0.00316 sin(6.33t)+0.00134cos(6.33t)-0.0000110sin(15.7t)-0.00214cos(52.2t).
а) б)
в) г)
д) е)
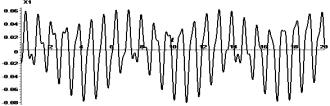
Рисунок 3 -
Перемещения x(t) на а, xj(t) , j = ![]() на б, в,
г, д, все вместе на е, для
динамической системы, состоящей из n = 4 одинаковых осцилляторов, обладающих одинаковыми
начальными условиями
на б, в,
г, д, все вместе на е, для
динамической системы, состоящей из n = 4 одинаковых осцилляторов, обладающих одинаковыми
начальными условиями
Справедливость формул,
представленных в таблице, соответствующих решениям динамической задачи (1)-(3) по
схеме на рисунке 1, читатель может самостоятельно проверить численным способом
с помощью реализаций в современных программных средах.
Выводы. На основе развитой авторами методики
[3-5] решения динамических задач многоэлементных механических систем со специальными
нагрузочными режимами получены аналитические формулы колебаний произвольного числа n линейных осцилляторов на общей
жесткой связи, сведенные в таблицу 1. Они позволяют легко управлять свойствами
синхронизируемых явлений, наперед определять и задавать его характеристики, устанавливать
зависимости между параметрами, обеспечивающими «синфазную» однонаправленную
синхронизацию, противофазную или иные виды динамических взаимосвязей между
телами. Вынужденные колебания крайних элементов с массами m1 и mn, энергетически поддерживаемые
внешними воздействиями, существенно влияют на изменения синхронности отклонений
масс m j , j = ![]() . При этом синхронными будут
колебания внутренних элементов механической многоэлементной системы с
одинаковыми отклонениями масс m j в начальный момент времени aj = a0, j
=
. При этом синхронными будут
колебания внутренних элементов механической многоэлементной системы с
одинаковыми отклонениями масс m j в начальный момент времени aj = a0, j
= ![]() . Отсутствие вынужденных нагрузочных режимов приводит
к полному согласованию перемещений или синхронизации, если колебания с
собственными частотами для всей механической системы в целом поддерживаются
какими-либо внутренними автоколебаниями.
. Отсутствие вынужденных нагрузочных режимов приводит
к полному согласованию перемещений или синхронизации, если колебания с
собственными частотами для всей механической системы в целом поддерживаются
какими-либо внутренними автоколебаниями.
Литература
1. Блехман И.И. Синхронизация
в природе и технике. — М.: Наука, 1981. — 352 с.
2. Пиковский A.C. Синхронизация: Фундаментальное нелинейное явление / A.C. Пиковский, М.Г. Розенблюм, Ю. Курте. — М.: Техносфера, 2003. - 494 с.
3. Dokukova N. A. and
Konon P. N. General laws governing in mechanical vibratory systems// Journal of
Engineering Physics and Thermophysics, 2006, Volume 79, Number 4, Pages
824-831, Publisher Springer New York, ISSN: 1062-0125.
4.
Dokukova N. A., Martynenko M. D. and Kaftaikina
E. N. Nonlinear vibrations of hydraulic shock absorbers// Journal of
Engineering Physics and Thermophysics, 2008, Volume 81, Number 6, Pages 1197-1200,
Publisher Springer New York, ISSN: 1062-0125.
5.
Dokukova N.A., Kaftaikina E.N.: The
synchronization of two linear oscillators. Perspektywiczne opracowania sa nauka
i technikami - 2012: Materialy VII miedzynarodowej naukowi-praktycznej
konferencji. Przemysl, Polska. 7-15 listopada 2012 r. Przemysl: Nauka i studia,
Vol. 18, pp. 28 – 35, 2012.