Физическая культура и
спорт / 3.Спортивная медицина и реабилитация.
к.т.н. Чернышев
В.П., к.т.н. Высоцкая Е.В.,
Чернышев
А.А., н.с. Порван А.П., Чернышев С.А.
Харьковский национальный университет
радиоэлектроники, Украина
Протез предплечья с внешним источником энергии
В большинстве стран мира для инвалидов с ампутацией предплечья находят применение протезы с биоэлектрическим управлением [1-4]. Однако не все инвалиды данной категории могут пользоваться биоэлектрическими протезами.
Для инвалидов с ампутацией предплечья, у которых недостаточная активность мышц для управления биоэлектрическим протезом, разработан протез предплечья с позиционным управлением исполнительными механизмами.
Протез (рис.1) содержит:
искусственную кисть 1; гильзы предплечья 2 и плеча 4; наплечник 5 и крепление 6,
а также систему управления, включающую следующие последовательно соединенные
узлы: оптроны управления 8,9 прямым и обратным ходом электропривода 10
исполнительного механизма искусственной кисти 11, узла ротации 12, локтевого
механизма 13 или плечевого узла 14, блок сравнения 17, импульсные
преобразователи 18,19 и усилитель мощности 20, к выходу которого подключен
электропривод 10 исполнительного механизма, например искусственной кисти 1. Отражающие
пластины оптронов имеют возможность перемещения под воздействием мышц инвалида.
Оптроны вместе с узлами системы управления размещены в корпусе 21,
установленном, например, в разрыве крепления 6.
На рисунке 2 изображена функциональная схема системы
управления протезом верхней конечности (одного канала управления одной парой
движения).
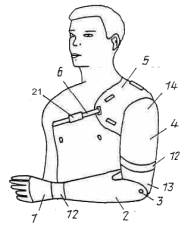
Рисунок 1 – Протез при размещении блока управления в разрыве крепления, общий вид.
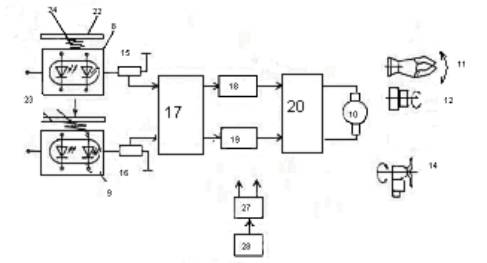
Рисунок 2 – Функциональная
схема системы управления протезом верхней конечности.
Оптроны 8 и 9 установлены в корпусе 21, где закреплены и узлы системы
управления. Отражающие пластины 22 и 23 оптронов 8 и 9 соответственно
посредством пружин 24 и 25 установлены в несущих элементах и имеют возможность
перемещения под воздействием мышц сгибателей – разгибателей предплечья, при
этом отражающие пластины перемещаются в отверстии 26 корпуса 21.
Оптроны 8 и 9 встроены в корпус 21 вместе с узлами системы управления,
образуют блок управления 7.
Питание системы управления осуществляется от источника 27 постоянного
напряжения, который через контакты микропереключателя 28 подключен к шинам
питания.
Протез работает следующим образом. При включении источника 27 постоянного напряжения и микропереключателя 28, установленного в тяге крепления 6, запитывается система управления. При сокращении мышцы сгибателя предплечья, соответствующем прямому движению протеза, например схвату, через пружину 24 приводится в движение отражающая пластина 22 оптрона 8, которая перемещается в сторону отверстия окна оптрона 8 внутрь отверстия 26, увеличивая интенсивность светового потока и изменяя сопротивление оптрона 8. Оптрон 9, установленный на мышце антагонисте, в это время не изменяет своего сопротивления и дисбаланс, отрегулированный на соответствующее сопротивление согласующими делителями 15 и 16, усиливается балансным блоком 17 сравнения и поступает в импульсный преобразователь 18, генерирующий импульсы, частота которых пропорциональна амплитуде входного сигнала. С выхода импульсного преобразователя 18 сигнал передается в одно из плеч мостового усилителя 20 мощности, а затем поступает на обмотку 10 исполнительного механизма 11 искусственной кисти 1, который выполняет схват со скоростью и силой, пропорциональной объему сокращения мышц сгибателя. При усилении сокращения мышцы отражающая пластина 22 приближается к соответствующему оптрону 8, увеличивая дисбаланс и увеличивая сигнал, проходящий через блок 17 сравнения. Частота подачи импульсов с импульсного преобразователя 18 увеличивается, увеличивается и сила схвата.
Для выполнения обратного движения необходимо вызвать сокращение мышц
антагонистов. При этом происходит перемещение отражающей пластины 23 оптрона 9,
управляющего противоположным движением, дисбаланс сигнала передается на второй
вход блока17 сравнения, далее на импульсный преобразователь 19 и второе плечо
усилителя 20 мощности, заставляя
электропривод 10 исполнительного механизма 11 искусственной кисти 1
отрабатывать обратное движение со скоростью, пропорциональной сокращению мышцы,
предварительно заданной согласующим делителем 16. Таким же образом
осуществляется управление с помощью мышц культи плеча или натяжением тяг при
вычленении плеча.
На рисунке 3 представлен протез предплечья со встроенным в приемную гильзу блоком управления.
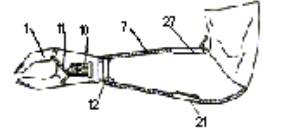
Рисунок 3 – Протез предплечья со встроенным в приемную гильзу блоком управления.
Таким образом, разработанный протез
предплечья с внешним источником энергии позволяет повысить надежность
протезирования и расширить показания к назначению протеза, путем обеспечения бесконтактного управления
позиционированием исполнительного механизма.
Литература:
1. European patent specification. ЕР 0 421 780 Bl. Application number: 90310869.4, Date of filing: 04.10.1990. Multifunction control of a prosthetic
limb using syntactic analysis of the dynamic myoelectric signal patterns
associated with the onset of muscle contraction.
2. United States. Patent Application Publication Yaeger. Pub. No.: US 2006/0263175A1. Pub. Date: Nov. 23, 2006. MYOELECTRIC LIMB HAND. Miami FL (USA).
3. А.С. № 1627172, Чернышев В.П., Яровой Е.А., Зарудный С.С. Протез верхней конечности. SU 1627172 A1/ A61F2/56. – Выд. 15.02.91, бюл. №6. – 4 c.
4. Основы протезирования: науч.
пособие / Г.В. Красюк, М.Т. Кавалько, П.М. Подпружников, В.В. Семенец и др. – Харьков: ХТУРЭ,
2000. – 330 с.