*99545*
С.Тилоев,
М.Х.Саидов, С.М. Саидамиров, Б.А. Каххаров, И.Ф.
Бобоев, Б. Х. Мухибулоев, Н.К. Одинаев,
(К.т.н., доцент, ассистенты и
соискатели ТАУ имени Ш. Шотемура г.Душанбе
Республики Таджикистан)
Экспериментальное исследование
основных кинематических параметров
планетарного фрикционного механизма привода рабочих органов
технологических машин
Для определения основных кинематических
параметров исследуемого механизма, в качестве центроида солнечного колеса были
приняты две формы солнечного колеса, изготовленные с следующими геометрическими
параметрами для привода рабочих органов хлопкоуборочных, чеканочных,
зерноуборочных, моечных машин, роторных измелчителей зерновых культур и
бетономешалок:
I вариант
(зерноуборочных комбайнов)
Радиус ведущего звена R1 = 125
мм, длина направляющей кулисы L = 140 мм, радиус сателлитного колеса r = 20 мм, расстояние а = 0,02 изменили в пределах а =
12; 16; 25 мм.
II вариант
(хлопкоуборочных и чеканочных машин)
Обозначения те же. R1 = 90 мм; L = 275 мм, r = 25 мм;
α = 12; 16; 25 мм.
III вариант
(моечных машин и роторных измелчителей)
Обозначения те же. R1 = 135
мм; L = 140 мм; r = 20 мм;
α = 12; 16; 25 мм.
IV вариант
(измелчителей зерновых культур и бетономешалок)
Обозначения те же. R1 = 100
мм; L = 175 мм; r = 25 мм;
α = 12; 16, 25 мм.
Силовое замыкание сателлитного колеса
осуществлялось посредством жесткого элемента кулисной пары «кулиса –
направляющая» при чем направляющая шарнирно соединено с осью вращения
звена (рис.1).
Составное телескопическое водило
приводилось в движение посредством электродвигателя I кВт, минимальное число оборотов
двигателя которого равна ngb =
2800 об/мин.
На составное водило было установлен
датчик, позволяющий регистрировать закон относительного изменения длины водила
(направляющей кулисы).
На корпусе имитационной физической модели был закреплен индуктивный
датчик через каждые 30 градусов с целью градированию полного оборота водила
(ведущего звена) и наклеен отметчик, указывающей
начало
отсчета.
Для
измерения угловой скорости сателлита
был установлен тахогенератор (ТГ) с
линейной характеристикой. Для записи исцилограммы использовался осциллограф
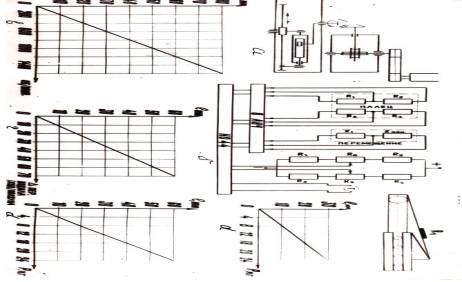
марки НО – 41. На рис.1
показана:
а)
кинематическая схема экспериментальной установки,б) электрическая схема
тензометрирования, в) тарировочный
график перемещения водила.
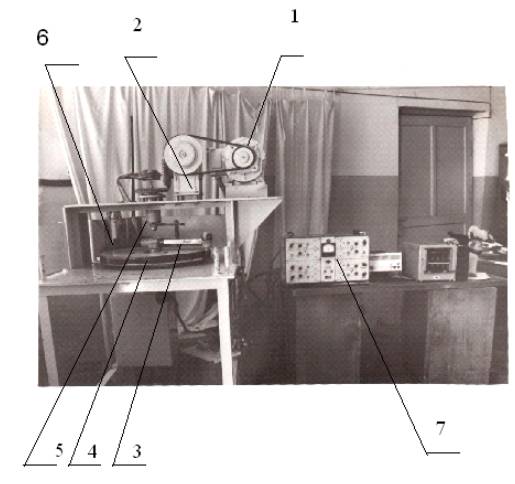
Рис. 1. Экспериментальная установка планетарного фрикционного механизма с составным водилом: 1 – электродвигатель; 2 –редуктор;
3 – составное водило;
4–солнечное колесо; 5– ведущий звена; 6–тахогенератор; 7-
осцилограф НО-41.
Из тарировочных графиков видно, что
максимальное число оборотов сателлита равно
ncmax = 1426 об/мин. Масштаб для тарирования числа оборотов
сателлита равен Кn = 20 об/мин
мм; масштаб измерения
перемещения водила Кl = 1,1 мм/мм.
На рис.2
Осциллограммы снятые для
двух вариантов:
I вариант
Сателлит катится по некруглому солнечному
колесу, имеющий следующие геометрические параматры:
а) R1 = 125 мм
L = 140 мм;
б) R1 = 90
мм L = 175 мм
Значение
α = 12; 16; 25 мм.
II вариант
Сателлит катится по некруглому
солнечному колесу с внешним зацеплением, имеющий следующие геометрические
параметры
а) R1 = 135 мм;
L = 140 мм; R1 = 100
мм; L = 175 мм
Значение
α = 12; 16; 25 мм.
Фрагмент осциллограммы этих вариантов показано на рис. 3 где
1 – перемещение водила; 2 – обороты сателлита; 3 – обороты ведущего
звена; 4 – усилие на палец 1 ведущего
звена; 5 – усилие на палец 2 ведущего звена.
Рис
2.Электрическая схема тензометрирования и тарировочные графики экспериментальной установки: а)
кинематическая схема привода, б) электрическая схема в) тарировочный график
числа оборотов сателлита
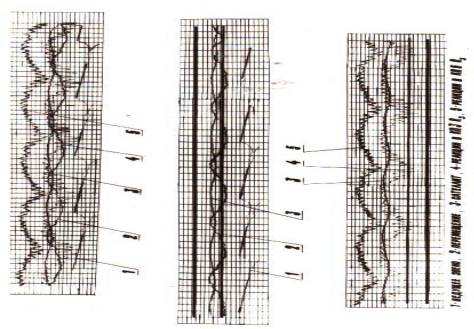
Рис. 3. Фрагмент осциллограммы.
Для второго случая перемещение водила равно:
![]() ;
;![]() ;
;![]()
Из этих результатов следует, что при
изготовлении имеется погрешность в порядке 1,5 – 2 мм, что составляет 7 – 9
процентов.
Значение числа оборотов сателлита для
этих вариантов определяется
![]() ;
; ![]()
![]()
![]() Угловая скорость ведущего звена равна
Угловая скорость ведущего звена равна
![]() ;
; ![]() ;
; ![]()
Отсюда следует, что угловая
скорость кулисной пары меняется соответственно
![]() ;
; ![]() ;
; ![]()
Линейная скорость кулисной пары в
центре сателлита соответственно равна
![]() ;
; ![]()
Из этого следует, что число оборотов
сателлита изменяется от nc =
530 об/мин до nс = 1426
об/мин.
Перемещение водила или ход ползуна
соответственно при α = 25 мм равен
S1 = 2 α (1)
Тогда
значение ![]()
![]()
На основе обработки осциллограммы
выявлены: перемещение составного водила, угловая скорость и линейная скорость
сателлитного колеса.
Для выявления динамических реакций
в кинематических парах «кривошип – кулисная пара» используем значение геометрических параметров на основании [1].Обозначим масштабную величину усилия на
пальце с плечом h1 = 30
мм через К1 = 6,9
Н/мм и с плечом h2=60 мм K2 = 3,1 Н/мм
[1-3].
Усилие, возникающее на пальце ведущего
звена для первого случая с масштабным значением показаны тарировочные данные
для усилия с плечом равны
а)
h1 = 30
мм -
K1; б) h2 = 60
мм -
K2
На осциллограмме для первого
случая это равен = 22 мм усилие на палец с масштабом
К1 = 6,9 Н/мм
равен; R1 = 22 ·
6,9 = 144,7 Н; RImin = 2,2 · 6,9 = 14,8 Н
Для второго пальца с масштабом К2 = 3,1 Н/мм равен
RΙΙmax =3,1· 18,5 = 57,35 H; RIImin = 2 · 3,1 = 6,2
H
Уравновешивающее усилие, перпендикулярное
кривошипу, определяется выражением
 (2)
(2)
Значение
равны
![]() ;
; 
Фрагмент осциллограммы для динамических
параметров приведены на рис. 3
Приведем сравнительный анализ
теоретического и экспериментального исследований. Рассмотрим изменения длины
водила, угловой скорости и линейной скорости сателлитного колеса для случая
внешнего зацепления в зависимости от выбранной формы солнечного колеса.
Полученные численные значения
экспериментальных данных позволит применить оптимальные динамические параметры
при проектировании планетарных фрикционных механизмов с составным кулисным
водилом.
На основании экспериментальных
исследований получены закономерности изменения основных параметров исследуемого
механизма. На рис.4. показаны длина водила, сила оборотов и линейная скорость
сателлита, реакции в кинематических парах
«ведущее звено – кулиса»
(сплошные линии).
Теоретические закономерности изменения
этих параметров (пунктирными линиями).
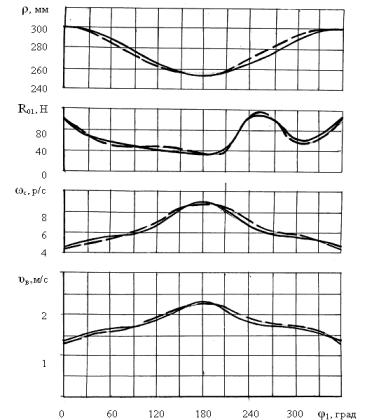
Рисунок 4. График
сравнительного анализа теоретических и экспериментальных исследований
(хлопкоуборочных и чеканочных машин)
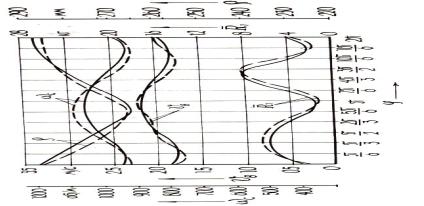
Рисунок 5. График сравнительного анализа теоретических и экспериментальных исследований (рабочих органов зерноуборочных машин, роторных измелчителей и моечных машин)
ЛИТЕРАТУРА
1.Усманходжаев Х.Х., Тилоев С. Эпициклический механизм. А.с.
№1033797. Бюл. №29, 1983, 3 с.
2.Тилоев
С. и др. Малый патент РТ ТJ № 157-158-200-201-202-225-226-
227-268-269-270-286-287-288-324-325-326-327-328
Бюл.
51, 53,56,58 Душанбе. 2007- 2010 гг.
3.
Тензометрирование в машиностроении (справочное пособие) под ред.
к.т.н.
Р.Н. Макарова –М – Машиностроение 1978 стр. 286.
4. Бауман
Э. измерение сил электрическими методами –М- Мир, 1978
стр.426.