*99546*
С.Тилоев,
Ф.Ф. Сабзаева, А.Н.Шоев, Р.Э.
Махмуродов,
С.М.
Саидамиров, С.Р.Раупов
(Таджикский аграрный
университет имени Ш. Шотемура
г. Душанбе, Таджикистан)
Математическая модель трехступенчатого
планетарно – синусного механизма
Разработка
относится к сельскохозяйственной и автотракторной машиностроению в
частности (для использования чеканочных аппаратах, опрыскивателей, дождевальных
машинах для подачи воды под давлением для мойки деталей, узлов колен валов,
блок цилиндров автомобилей и тракторов с использованием моющего средства, а
также в пожаротушении для подкачки воды).
Аналогом является синусный механизм
содержащий кривошип, кулиса, камен и стойка [1,2].
Недостатки: Постоянные скорости и ускорения; Низкий КПД и
надежности; Отсутствие универсальность.
Аналогом
является планетарно – синусный механизм содержащий кривошип, поршен, кулиса,
направляющий, сателлит, солнечное колесо, шток (насоса) и стойка [3].
Недостатки: Имеет один насос; Низкий КПД и надежность;
Низкий производительность.
Предлагаемый устройство содержит
кривошип 1, кулиса 2, поршен 3, направляющий 4, сателлит 5, солнечное колесо 6,
трех штоков (насосов) 7, три наконечники 8, сектор 9, пружина 10 и наконечники
сектора (1 и стойка 12) (Рис.1).
Принцип работы: При вращения кривошипа
1, внутри кулисы 2 совершает возвратно поступательное движения поршен 3
шарнирно соединение с направляющим 4, причем направляющий 4, шарнирно соединено
с сателлитом 5, при этом сателлит совершает вращательное движения вокруг своей осы и
перекатывается по солнечному колесу 6,
при этом штоки насосов 7 совершают
возвратно поступательное движения и происходит опрыскивание жидкости при помощи
трех наконечников 8 к сектору 9, при помощи наконечника 11 сектора 9 происходит
опрыскивание жидкостей, ядохимикатов и моющего средства, причем для лучшего
контакта звеньев предусмотрено пружина 10, все детали и узлов механизма
установлена на стойке (корпуса) 12.
Следует
отметить, что кулиса 3 и штоки насосов 7 жестко закреплены (Рис.2).
Преимущество: Переменные скорости и
ускорения; Высокий КПД и надежность;
Высокий производительность подачи жидкости; Большая ширина
захвата.
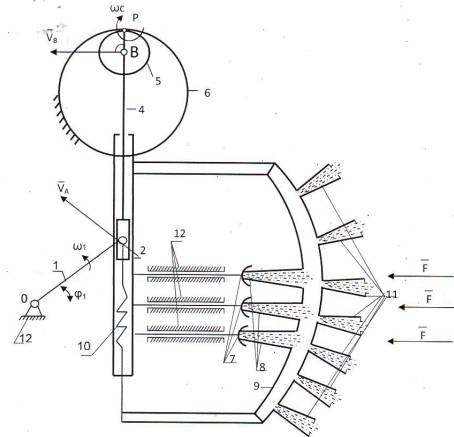
Рис .1 Динамическая
схема трехступенчатого планетарно – синусного механизма
Исследуемый механизм может
использоваться в качестве привода рабочих органов чеканочных машин.
Работоспособность привода ножей чеканочных машин характеризуется в основном
активностью их ножей. Целью конструирования новых приводных механизмов является
повышение эффективности и увеличение производительности чеканочных аппаратов
при срезании верхушек хлопчатника и подача ядохимикатов.
Угловая скорость сателлита равно
Угловая ускорения сателлита
определяется

Когда ![]() угловая ускорения
сателлита равно
угловая ускорения
сателлита равно
Динамическая схема исследуемого класса
приводного механизма приведена на рисунке 1, параметры которого равны: О1А2=R1 – радиус
ведущего звена (кривошипа) 1, В1Р1=В2Р2=r – радиус сателлита5, l1=А1В1–
длина ползунов 7, ![]() – угол поворота
ведущего звена 1 и r=О1Р1–
расстояние линии касания сателлита и солнечного колеса до оси вращения
кривошипа Оr.
– угол поворота
ведущего звена 1 и r=О1Р1–
расстояние линии касания сателлита и солнечного колеса до оси вращения
кривошипа Оr.
Уравнения Лагранжа II рода для исследуемого класса механизма определяется
выражением: [1-5]
 (1)
(1)
где
![]() - угловая скорость кривошипа, (р/с);
- угловая скорость кривошипа, (р/с); ![]() - угловая ускорения (р/с2);
- угловая ускорения (р/с2); ![]() - приведенный момент инерции привода (кгм2);
- приведенный момент инерции привода (кгм2); ![]() ,
, ![]() - движущийся момент и момент сопротивления (кгм2).
- движущийся момент и момент сопротивления (кгм2).
Приведенный момент согласно [1-3] равна
![]()
![]() или
или ![]()
Где P-давления
насосов (н/м2), A- площадь
сечения в (м2)
После некоторых преобразований, уравнения (1)
примет вид:
![]() (2)
(2)
где
переменные коэффициенты равны
 и F = P A
и F = P A
Уравнения (2) является нелинейным,
неоднородным уравнением движения синусного механизма в форме Лагранжа II рода с переменными параметрами. Исследование
динамических характеристик планетарных синусных механизмов привода
опрыскивателей (борьба сельхозвредителей) и чеканочных машин является одним из
основных проблемой проектирование сельскохозяйственных машиностроение.
На рис.1. приведена динамическая схема
привода планетарно синусного механизма чеканочных машин и опрыскивателей, а
также привода трех секционных дождевальных машин для подачи воды и
ядохимикатов.
Решая нелинейное уравнения (2) движения планетарных синусных
механизмов, позволяет определить параметры агрегатов и проектировать машинный
агрегат с одним сателлитом и трехнасосным механизмом, позволяющий увеличить производительность машины для чеканки хлопчатника, мойки с использованием моющих средств
деталей и узлов автотракторной техники а также увеличивается производительность
процесса подачи воды и ядохимикатов.
Разработана
экспериментальная установка исследуемого механизма экономический эффект на одну
машину составляет 50 тысяч Российских
рублей
ЛИТЕРАТУРА
1. И.И.Артоболевский. Теория механизмов и машин. М. 1975.
2. Кожевников С.Н. ТММ. М. 1973, стр. 560.
3.Тилоев С. и др. Малые патенты РТ Тj 202
Планетарно-синусный
механизм, Тj 227 Двойной синусный механизм с двойным насосом, Тj
268
Двухкулисный планетарно-синусный механизм.
Душанбе 2008-2009г.
Бюл.53-56.
4. Тилоев С. и др. Автореферат канд.
диссертации. Каунас. 1998г. 18 стр.
5. Тилоев С. и др. Материалы I, II и III Международной конференции «Механика – 94», «Механика – 97», «Выбротехника – 98»,
Вильнюс, Каунас. 1994, 1997 и 1998 гг.