*99563*
Скапа Е. И.,
Синчук И. О., к. т. н., доц., Якимец С. Н., к. т. н., доц.
Кременчугский
национальный университет имени Михаила Остроградского, Украина
Исследование поведения тягового электропривода рудничего электровоза при
торможении
В Украине в последние годы активно
возобновилась работа по созданию и внедрению в практику отечественного горного
машиностроения высокоэффективных тяговых электроприводов (ТЭП) типа: IGBT
– преобразователь, асинхронные тяговые двигатели (ТАД) с микропроцессорной
системой управления (МСУ) [1].
Одной из увиденных задач, стоящих перед
разработчиковами данных систем ТАП является конструирование алгоритмов работы
МСУ в тормозных режимах [2, 3].
Из-за больших и резкопеременных динамических
режимов, протекающих в коротких (до 5 с) интервалах времени при торможении
рудничих электровозов во время погрузочно-разгрузочных операции основным видом
торможения является пневматическое, когда колодочные тормоза фиксируют колесные
пары электровоза. Одновременно с этим видом торможения тяговые электрические
двигатели отключаются от системы электроснабжения и переходят в режим
динамического торможения. В виду неоднозначности протекания переходных электромеханических процессов при таком
торможении этот момент функционирования ТАП подлежит дополнительному
индивидуальному исследованию.
Для получения минимального времени торможения и
динамических усилий требуется осуществить правильную регулировку тормозов –
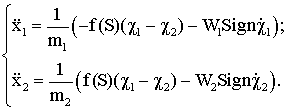
обеспечить требуемое значение тормозного усилия. Формализуя задачу, сформируем
цель поиска следующим образом: при F(t) = 0 определить значения W1
и W2 при совместном движении системы, для которых ε → min.
Исходя из системы уравнений (1):
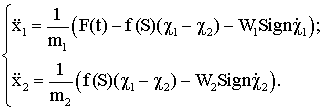 (1)
(1)
Преобразуя систему (1), получим:
|
|
В этом случае предварительный поиск
осуществлялся методом градиента при С1 = 6000, С2 = 3000
и прежних начальных условиях. Варьируемые значения параметров, значения
критериев и времени торможения сведены в таблицу 1.
Таблица 1 – Варьируемые
значения параметров, значения критериев и времени торможения
|
W1 |
W2 |
t |
ε |
σ |
|
1000 |
1400 |
12,6 |
-156 |
26,1 |
|
1000 |
2025 |
12,6 |
-150 |
31,0 |
|
1000 |
2650 |
13,3 |
-72 |
0,1 |
|
1000 |
3273 |
11,4 |
-48 |
0,1 |
|
1000 |
2962 |
12,3 |
-59 |
0,1 |
|
1000 |
3587 |
10,6 |
-38 |
0,1 |
|
1000 |
3900 |
10,0 |
-29 |
0 |
|
1000 |
4525 |
9,9 |
-29 |
0 |
|
1000 |
6000 |
7,0 |
-9,6 |
8,8 |
|
1000 |
5000 |
8,14 |
-7,2 |
0,4 |
|
1000 |
4800 |
8,42 |
-9,9 |
0,02 |
|
1250 |
4800 |
8,08 |
-6,3 |
0,37 |
|
750 |
4800 |
8,8 |
-14,7 |
0,04 |
|
1100 |
4600 |
8,56 |
-11,7 |
0,004 |
Исходя из результатов поиска, оптимальному
режиму торможения соответствуют W1 =
1000 – 1100;
W2 = 4600 – 4800.
Для получения математического описания
поверхности по методике и плану, аналогичному для процесса разгона была
проведена серия из 17 опытов, результаты которых приведены в таблице
2. Центр
области планирования принят в точках W1 =
1400; W2 =
2025. Шаг
поиска ΔW1
=
200; ΔW2 =
425.
Таблица 2
– Результаты
опытов математического описания поверхности торможения
|
№ п/п |
Z1 |
Z2 |
W1 |
W2 |
t |
ε |
σ |
|
1.
|
1 |
1 |
1600 |
2337 |
8,12 |
-92,79 |
24,69 |
|
2.
|
1 |
-1 |
1600 |
1712 |
8,72 |
-112,16 |
26,175 |
|
3.
|
-1 |
1 |
1200 |
2337 |
11,14 |
-143,92 |
37,93 |
|
4.
|
-1 |
-1 |
1200 |
1712 |
9,88 |
-114,354 |
22,45 |
|
5.
|
0 |
0 |
1400 |
2025 |
10,08 |
-138,34 |
35,03 |
|
6.
|
2 |
0 |
1800 |
2025 |
8,00 |
-102,79 |
27,00 |
|
7.
|
-2 |
0 |
1000 |
2025 |
12,56 |
-150,32 |
31,00 |
|
8.
|
0 |
2 |
1400 |
2650 |
9,38 |
-108,66 |
30,02 |
|
9.
|
0 |
-2 |
1400 |
1400 |
8,52 |
-93,62 |
15,39 |
|
10.
|
2 |
2 |
1800 |
2650 |
28,19 |
-91,64 |
- |
|
11.
|
2 |
-2 |
1800 |
1400 |
15,89 |
-80,84 |
- |
|
12.
|
-2 |
2 |
1000 |
2650 |
15,43 |
-64,99 |
- |
|
13.
|
-2 |
-2 |
1000 |
1400 |
12,58 |
-155,85 |
26,08 |
|
14.
|
- |
- |
1000 |
3275 |
11,42 |
-47,56 |
0,09 |
|
15.
|
- |
- |
1000 |
2962 |
12,32 |
-58,75 |
0,11 |
|
16.
|
- |
- |
1000 |
3587 |
10,64 |
-37,61 |
0,02 |
|
17.
|
- |
- |
1000 |
3900 |
9,96 |
-29,121 |
0,00 |
Аппроксимирующий многочлен представляется в
виде:
![]() (3)
(3)
Коэффициенты определяются по методике проф.
Рафалес-Ламарка. Коэффициенты A0 – Аm
находятся по таблице 3.
Таблица 3
– Коэффициенты
Am
|
№ п/п |
Z1 |
Z2 |
A0 |
A1 |
A2 |
A11 |
A12 |
A13 |
|
1.
|
+1 |
+1 |
1 |
1 |
+1 |
-17 |
-17 |
1 |
|
2.
|
+1 |
-1 |
1 |
1 |
-1 |
-17 |
-17 |
-1 |
|
3.
|
-1 |
+1 |
1 |
-1 |
+1 |
-17 |
-17 |
-1 |
|
4.
|
-1 |
-1 |
1 |
-1 |
-1 |
-17 |
-17 |
1 |
|
5.
|
0 |
0 |
3 |
0 |
0 |
-238 |
-238 |
|
|
6.
|
1 |
0 |
2 |
+1 |
0 |
-89 |
-166 |
|
|
7.
|
-1 |
0 |
2 |
-1 |
0 |
-89 |
-166 |
|
|
8.
|
0 |
1 |
2 |
0 |
1 |
-166 |
-89 |
|
|
9.
|
0 |
-1 |
2 |
0 |
-1 |
-166 |
-89 |
|
|
10.
|
2 |
0 |
-1 |
2 |
0 |
358 |
50 |
|
|
11.
|
-2 |
0 |
-1 |
-2 |
0 |
358 |
50 |
|
|
12.
|
0 |
2 |
-1 |
0 |
2 |
50 |
358 |
|
|
13.
|
0 |
-2 |
-1 |
0 |
-2 |
50 |
358 |
|
Например:

После определения аналогичным образом остальных
коэффициентов и пренебрегая A11 и A22
ввиду их малости, окончательно получим:
|
|
|
Как и в случае разгона, при торможении
электровозосостава также наблюдается соответствие минимума коэффициента динамичности
минимума времени торможения. Это объясняется тем, что при недостаточно
интенсивном торможении электровозосостава, имеющего большую массу, происходит
дополнительное ускорение электровоза, сопровождающееся увеличенными
динамическими усилиями, что приводит к увеличению суммарного времени торможения
системы.
Таким образом, констатируем, что оптимальный
закон изменения движущей силы F(t), более главный, чем в
случае F(t) = FMAX и не снижает производительности
электровозосостава.
Сравнение различных методов поиска приводит к
выводу, что случайный поиск в том случае, когда на основании проведенных
исследований и опыта инженерного проектирования сложилось общее представление о
ситуации, практически не эффективен.
Литература
1. Синчук О.Н. Перспективы развития
шахтных (рудничных) электровозов с энергосберегающими видами тяговых
электроприводов / О. Н. Синчук, С. В. Лебедкин, И. О. Синчук, О. О. Удовенко, О. В. Пасько /
Вісник Східноукраїнського національного університету імені Володимира Даля.
– Луганськ: СНУ ім. В. Даля. – 2006. –
№ 8 (102). – с. 83-92.
2. Синолицый А.
Ф. Опытный образец энергоэкономичного тягового электропривода: IGBT-преобразователь
– АД для рудничных электровозов. Разработка рудных месторождений / А. Ф. Синолицый,
О. В. Пасько, В. И. Колотило, С. В. Лебедкин / Весник
Криворожского технического университета. – Кривой Рог: КТУ, – 2005. Вып. 88. – с.
120-125.
3.
Синчук О.Н. Комбинаторика преобразователей напряжения современных тяговых
электроприводов рудничных электровозов / О. Н. Синчук, И.
О. Синчук, Н. Н. Юрченко, А. А. Чернышов, О. А. Удовенко, О. В. Пасько, Э.
С. Гузов. Научное издание. – Київ: ІЕДНАНУ, 2006. – 252 с.