Технические науки/12.Автоматизированные системы управления на производстве.
К. т. н. Войтюк И. Н.
Национальный
минерально-сырьевой университет «Горный»
Выделение полезного сигнала первичного
преобразователя плотности радиоизотопной измерительной системы с автоматической
минимизацией случайных и систематических погрешностей
Выходной сигнал первичного преобразователя радиоизотопной измерительной системы
(РИИС) представляет собой
последовательность отсчетов, полученных путем подсчета зарегистрированных
блоком детектирования прямого и рассеянного излучений гамма квантов за
последовательные промежутки времени фиксированной длительности.
При неизменных параметрах
контролируемой среды, т.е. при ее постоянной плотности
и химическом составе этот сигнал представляет собой траекторию однородного
случайного процесса с независимыми значениями, распределенными
по закону Пуассона с параметром I. Таким образом, рассматриваемый сигнал является белым шумом с распределением
Пуассона. Автокорреляционной функцией такого сигнала является дельта-функция. [1]
При прохождении через измерительную линию твердого материала, например
потока горной массы, средняя плотность вещества в контролируемом объеме будет флуктуировать. Это связано с наличием
пустой породы в угле. Закон распределения выходного сигнала РИИС в
случае появления флуктуирующего поглотителя искажается, при этом увеличиваются
математическое ожидание и дисперсия. Автокорреляционная функция выходного сигнала РИИС
также меняется, поскольку
широкополосный белый шум, характерный для неизменной объемной плотности среды, начинает модулироваться сравнительно
узкополосным процессом изменения средней объемной плотности среды (вызванным
появлением пустой породы в потоке).
Для реализации этой
измерительной идеологии необходимо решить задачу нахождения математической
модели чистого потока. Для этого построим математическую модель для нахождения
случайного распределения интенсивности ![]() квантов в угольном потоке и в потоке горной массы на примере
шахты «Комсомольская» ОАО «Воркутауголь», реализованную в среде MATLAB Simulink.
Для разработки имитационной модели были
использованы следующие параметры: значения объемных плотностей угля и пустой
породы соответственно
квантов в угольном потоке и в потоке горной массы на примере
шахты «Комсомольская» ОАО «Воркутауголь», реализованную в среде MATLAB Simulink.
Для разработки имитационной модели были
использованы следующие параметры: значения объемных плотностей угля и пустой
породы соответственно ![]() и
и ![]() , массовая концентрация пустой породы -
, массовая концентрация пустой породы - ![]() , массовые коэффициенты ослабления для угля и горной массы
соответственно 0,025 и 0,026 см2/г.
Толщина слоя для обоих случаев составляла 20см.
, массовые коэффициенты ослабления для угля и горной массы
соответственно 0,025 и 0,026 см2/г.
Толщина слоя для обоих случаев составляла 20см.
Согласно исследованиям
объемная плотность гетерогенного потока горной массы определяется из выражения:
 .
.
В результате
моделирования по известным проходным характеристикам получены случайные функции
изменения интенсивностей излучения для потока угля (слева) и горной массы с
массовой концентрацией пустой породы 30%(справа), как показано на рисунке 1:
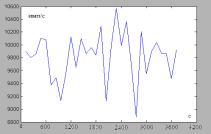
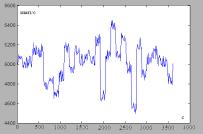
Рис. 1. Случайные процессы
изменения интенсивностей импульсов с выхода блока детектирования
Согласно полученным результатам при появлении на
ленточном конвейере смешанного гетерогенного потока, представленного углем и
пустой породой, меняется случайная функция интенсивности импульсов в
зависимости от изменения объемной плотности исследуемого объекта. В результате
изменения случайного процесса происходит изменение и его статистических
характеристик, в частности корреляционной функции, которая определяется из
выражения:
 ,
,
где
![]() время корреляции.
время корреляции.
Блок регистрации РИИС улавливает данное
изменение по переднему фронту корреляционной функции наложенного к
первоначальному случайного процесса после включения пустой породы и
автоматически осуществляет переключение градуировочной характеристики,
соответствующей случайному процессу, образованному гетерогенным потоком. Таким
образом, можно осуществить выделение
полезного сигнала первичного преобразователя плотности радиоизотопной
измерительной системы и измерить объемную плотность гетерогенного
потока.
Для данных целей была разработана блок-схема
алгоритма разделения полезного сигнала информативного параметра от помехи,
представленная на рисунке 2.
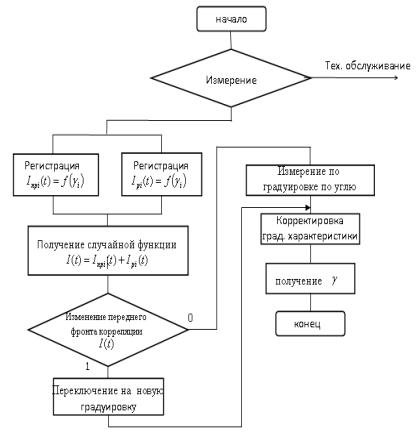
Рис. 2. Блок-схема алгоритма измерений
При анализе
погрешностей результатов измерений объемной плотности в ходе испытаний
выявлено, что систематическая составляющая погрешности измерений каналами
прямого и рассеянного гамма-излучений обусловлена нелинейностью выходных
сигналов блоков детектирования, вызванных неточностями при первичном
градуировании физических характеристик контролируемых сред. Она также вызвана
рядом других факторов, влияющих на точность и стабильность градуировочных
характеристик, в частности, старение элементов системы, дрейф электроники,
изменение температуры окружающей среды, уменьшение интенсивности
гамма-излучения и т. д. [2]
Для минимизации влияния данных факторов
разработан алгоритм автоматической корректировки градуировочных характеристик, представленный
на рисунке 3, согласно которому происходит усреднение измеренных и вычисленных
показаний РИИС за минимальный отрезок времени порядка 5мс.
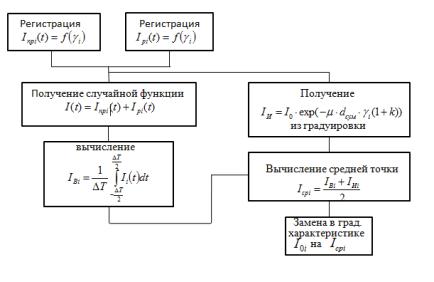
Рис. 3. Алгоритм
корректировки градуировочных характеристик
Таким образом,
происходит постоянное уточнение значение объемной плотности в текущий момент
времени, что исключает систематические погрешности измерений.
Случайная составляющая погрешности
измерений обусловлена в основном случайным характером процессов излучения,
взаимодействия с контролируемой средой и регистрации квантов гамма-излучения, а
также в результате многократного преобразования сигнала измерительной
информации. [2]
Для уменьшения погрешности до требуемого
значения, при расчете необходимого объема накопленных при регистрации
гамма-излучения данных, необходимо исходить только из информативной (полезной)
составляющей сигналов блоков детектирования, а не из суммы полезного и фонового
сигналов. Уменьшение
случайных погрешностей также обеспечивается за счет увеличения частоты
дискретизации измерений до ![]() с последующим усреднением значений.
с последующим усреднением значений.
Литература:
1. Большаков И.А. Прикладная теория случайных потоков / И.А.
Большаков, В.С. Ракошиц – М.: Советское радио, 1978. -
287с.
2. Бурдун Г.Д. Основы метрологии / Г.Д. Бурдун,
Б.Н. Марков - М.: Изд-во стандартов, 1985. – 256с.
3.