“Технические
науки” / 12.Автоматизированные системы управления на производстве.
PhD of Science Khakimyanov M.I., PhD of
Science Svetlakova S.V.
Ufa State Petroleum Technological University,
Russia
CONTROL OF SUCKER ROD PUMP UNITS WORK BY METHOD OF
ANALYSIS WATTMETER CARDS
Recently oil production
industry has been paying much attention to
the introduction of modern
automation technologies. Electric units of sucker rod pumps (SRP) are one of
the main objects of automation in the oil industry. This is due to their large
number and that they are scattered over the large area, as well as their distance
from the dispatch centers [1].
Modern controllers allow to
measure the electrical parametersof the motor SRP such as the input current,
active and reactive power, voltage level and power factor.
The efficiency and reliability of the
well-equipped SRP are known to directly depend on the proper selection of
equipment and balancing. Balance setting is determined by the analysis of
wattmeter cards. An analysis vattmeter card of SRP allows you to get the
electric power parameters, determine the characteristic fault ground and
downhole equipment.
To measure with the help of
wattmeter cards it is necessary to connect a measuring controller as shown in
Figure 1. Wires to measure voltage and current are connected to each of the
three phases [2].
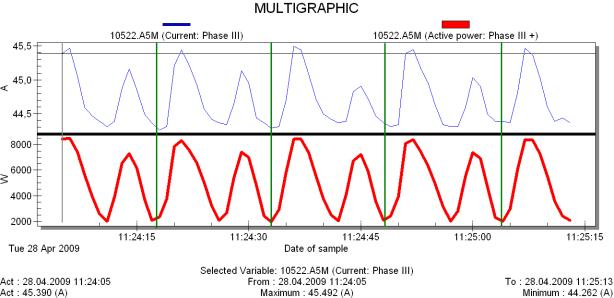
Figure 2 shows an example
of graphs of SRP electric drive parameters. The bold lines indicate the moments
of the rod passing the lower dead point or running start points.
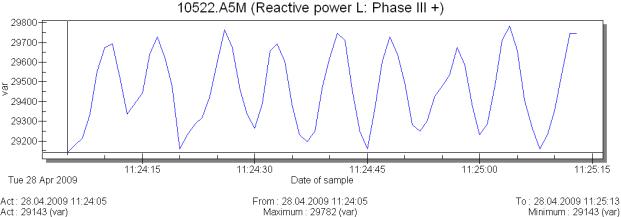
As shown in Figure 2, the
current and active power peaks while the rod moving up and down are not the
same, indicating that the imbalance of SRP installation. Reactive power is
inductive (inductance caused by the motor windings) and significantly exceeds
the active power: 30 kVAr against 2 ... 8 kW. Moreover, reactive power in the
swing varies only slightly - no more than 2%, while the active power varies by
75%. Power factor changes from 0.06 to 0.27.
Figure 1 – Measurement scheme of electrical parameters of SRP unit motor
Obviously the installation
motor is greatly underused - the maximum active power is 8 kW of the installed
capacity 30 kW, which negatively affects the energy parameters.
The SRP balance can be
rated (measured) with the help of the current or active power [3]:
![]() ,
,
![]() ,
,
where DP and DI -
unbalance calculated through (using) power and current, respectively;
PU and IU
- peak current and active power while lifting rods;
PD and ID – peaks of active
power and current while downhill bars.
We obtain the following
values of unbalance for this well:
![]() ,
,
![]() .
.
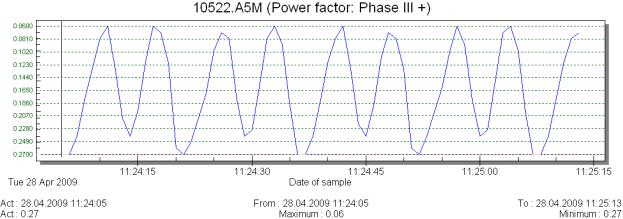
Figure 2 – Graphs of SRP electrical
parameters change
Comparing DP and
DI it can be concluded that the assessment of SRP balance by current
is very rough, as the current varies a little because of the strong influence
of the reactive component of power. Thus, the balance assessment in the
technical availability should be carried out by the active power consumption by
the motor drive.
To summarize, we can
conclude that the control of electrical parameters is an essential factor in
SRP automation and should be implemented (realized) in all modern controllers.
In addition to the automation functions this equipment will allow to organize
the control of energy consumption in a particular well and enable their
integration into the systems of technical and commercial electricity metering.
References
1 How to
Maintain High Producing Efficiency in Sucker Rod Lift Operations: [site]. URL: http://www.rogtecmagazine.com/PDF/Issue_013/07_Maintenance.pdf.
2 Power
Current Transducer: [site]. URL: http://echometer.com/Default.aspx?tabid=107.
3 M.I. Hakimyanov, M.G.
Pachin. Monitoring of sucker rod pump units on result of the analysis wattmeter
cards. Electronic scientific journal "Oil and Gas Business", 2011,
Issue 5, pp. 26-36. http://www.ogbus.ru/authors/Hakimyanov/Hakimyanov_7.pdf.