Шадхін В.Ю., Ковбасенко С.О., Бабій Г.В.
Черкаський державний технологічний університет
АНАЛІЗ СУЧАСНИХ СУПУТНИКОВИХ
НАВІГАЦІЙНИХ СИСТЕМ
Загальна характеристика супутникових радіонавігаційних
систем
Супутникові
радіонавігаційні системи представляють собою все погодні системи космічного
базування і дозволяють в глобальних масштабах визначити поточні місцеположення
рухомих об’єктів і їх швидкість, а як же реалізовувати точну координацію часу.
Принцип дії
систем полягає у тому, що навігаційні супутники випромінюють спеціальні
електромагнітні сигнали. Апаратура користувачів, розташована на об’єктах, що
знаходяться на поверхні Землі або в навколоземному просторі приймають ці
сигнали і після спеціальної обробки виробляють дані про місцеположення і швидкість
об’єкта. На рисунку 1 представлена супутникова радіонавігаційна система як
високотехнологічна інформаційна система, що складається з п’яти основних
сегментів.
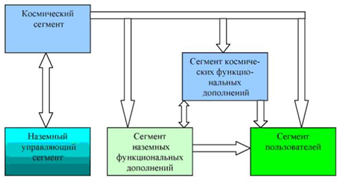
Рисунок 1 – Організація супутникової радіонавігаційної
системи
Наземний
керуючий сегмент включає в себе центр управління космічним сегментом, станції
стеження за навігаційними сегментами (радіолокаційні і оптичні), апаратуру
контролю стану навігаційних супутників. Керуючий сегмент вирішує задачі
визначення, прогнозування і уточнення параметрів руху навігаційних супутників,
формування і передачу на бортову апаратуру супутників цифрової інформації, а
також ряд контрольних і профілактичних функцій. Космічний сегмент представляє
собою систему навігаційних супутників, що обертаються по еліптичним орбітам навколо
Землі. На кожній орбіті знаходяться декілька супутників. Навігаційний супутник
має на борту радіоелектронну апаратуру, що випромінює у напрямку Землі
шумоподібні непереривні радіосигнали, що містять інформацію яка необхідна для
проведення навігаційних визначень з допомогою апаратури користувача.
Час у супутниковій радіонавігації
У
супутниковій радіонавігації час грає виключне значення, оскільки основні
навігаційні визначення виконуються за формулами, в яких параметр часу присутній
неоднократно. Це перш за все час розповсюдження електромагнітного сигналу від
навігаційного супутника до користувача, час «включення» годинників супутника,
час синхронізації даних, що передаються з супутника, час проходження
електромагнітного сигналу через атмосферу, вплив на час релятивістських ефектів,
суміщення шкал часу супутника і споживача і багато іншого.
За
одиницю вимірювання часу зручно приймати добу – час одного оберту Землі навколо
своєї осі. В астрономії існує дві одиниці часу під назвою доба: зіркова доба і
сонячна доба. Зіркова доба визначається інтервалом часу між двома проходженнями
нульового меридіану через точку весняного рівнодення у. Сонячна доба визначається інтервалом часу між двома
проходженнями нульового меридіана через центр видимого Сонця.
На
сьогоднішній день розрізняють наступні системи всесвітнього часу: UT0 – всесвітній час, безпосередньо
отримуваний з астрономічних спостережень добового руху зірок – час на миттєвому
гринвіцькому меридіані, положення якого визначено миттєвим положенням полюсів
Землі; UT1 – всесвітній
час середнього гринвіцького меридіану, що визначається середнім значенням
полюсів Землі. Воно виходить виправленням значень UT0 за допомогою
поправки ![]() через
рух географічних полюсів:
через
рух географічних полюсів:
![]() . (1)
. (1)
Поправка ![]() залежить від координат миттєвого полюса xр, ур, що
відраховуються відносно загальноприйнятого Міжнародного умовного початку (СIO, МУН) і мають вигляд:
залежить від координат миттєвого полюса xр, ур, що
відраховуються відносно загальноприйнятого Міжнародного умовного початку (СIO, МУН) і мають вигляд:
![]() ,
(2)
,
(2)
де ![]() і
і ![]() -
координати місця спостереження; UT2, UT1 – всесвітній час середнього гринвіцького меридіану,
звільнене від впливу частини сезонних періодичних варіацій кутової швидкості
обертання Землі, додаванням до значень UT1 відповідної
сезонної поправки.
-
координати місця спостереження; UT2, UT1 – всесвітній час середнього гринвіцького меридіану,
звільнене від впливу частини сезонних періодичних варіацій кутової швидкості
обертання Землі, додаванням до значень UT1 відповідної
сезонної поправки.
![]() . (3)
. (3)
Рух
навігаційного супутника по орбіті
Рух
планет і штучних супутників у просторі реалізується за законами небесної
динаміки. Рух штучних супутників можна оцінювати і розглядати як обурений так і
не обурений. Не обуреним рухом можна називати рух під дією сил одного
притягуючого центра.
Під
обуреним рухом розуміють рух супутника, на який крім сили земного тяжіння,
діють інші обурюючи сили: повітряні поля, тяжіння Землі через не сферичності і
різні щільності, вплив центра мас інших планет, опір оточуючого середовища і
т.д.
При
не обуреному русі навігаційного супутника його траєкторія, що називається
орбітою описується рівнянням в популярній системі координат r, ![]() .
.
 ,
(4)
,
(4)
де: r – радіус
вектора; e - ексцентриситет; ![]() - полярний кут; р - фокальний параметр.
- полярний кут; р - фокальний параметр.
Рівняння
(4) при ![]() є окружність, при
є окружність, при ![]() - парабола,
- парабола, ![]() -гіпербола, при
-гіпербола, при ![]() - еліпс.
- еліпс.
Навігаційні
супутники рухаються по еліптичним орбітам ![]() . Розглянемо рисунок 2. На рисунку зображена
еліптична траєкторія навігаційного супутника. Траєкторія лежить в площині, що
проходить через центр Землі. Центр мас Землі являється одним з фокусів еліпса.
Площина, в якій знаходиться еліпс називається орбітальною.
. Розглянемо рисунок 2. На рисунку зображена
еліптична траєкторія навігаційного супутника. Траєкторія лежить в площині, що
проходить через центр Землі. Центр мас Землі являється одним з фокусів еліпса.
Площина, в якій знаходиться еліпс називається орбітальною.
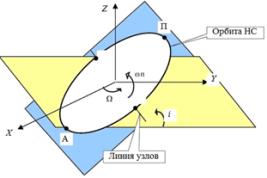
Рисунок 2 –
Орієнтація орбітальної площини
Орієнтація
орбітальної площини характеризується її розташуванням відносно площини
екватора, висхідним і спадним вузлами; довготою висхідного вузла і накопиченням
орбіти.
Пряму,
перетину обох площин, називають лінією обох вузлів. Вузлами орбіти являються
дві точки її перетину з площиною екватора (U і D відповідно). Точка U – висхідний
вузол, характеризує перетин площини екватора при русі супутника з південної
півсфери в північну; точка D – низхідний вузол , характеризує
перетин площин екватора при русі супутника з північної півсфери в південну.
Довгота
висхідного вузла ![]() - відраховується
у площині екватора від осі ОХ до
лінії (
- відраховується
у площині екватора від осі ОХ до
лінії (![]() лежить в межах 0...360°). накопичення орбіти
і - двогранний кут між екваторіальною
і орбітальною площинами (і лежить в
межах 0....180°), що відраховується проти годинникової стрілки для
спостерігача, що знаходиться у точці висхідного вузла.
лежить в межах 0...360°). накопичення орбіти
і - двогранний кут між екваторіальною
і орбітальною площинами (і лежить в
межах 0....180°), що відраховується проти годинникової стрілки для
спостерігача, що знаходиться у точці висхідного вузла.
Орбіту
називають полярною при i = 90°; екваторіальний при i = 0°; нахилений при 0 <i< 90°.
Висновки
Таким
чином, можна вважати, що супутникова радіонавігаційна система, як
високотехнологічна інформаційна система, складається з п’яти основних
сегментів: наземний керуючий сегмент, космічний керуючий сегмент, сегмент
користувачів, сегменти наземних і космічних функціональних додатків.
Також
у системі координат виділяють три поняття: місцева, геоцентрична інерційна (ECI) і геоцентрична
гринвіцька (обертаюча) прямокутна система координат (ECEF).
Література
1.
В. И. Комашинский, А. В. Максимов. Системы подвижной
радиосвязи с пакетной передачей информации. Основы моделирования, 2006.
2.
В. Ф. Худяков, В.А. Хабузов. Моделирование источников вторичного
электропитания в среде MATLAB 7.x: учебное пособие. СПб.: ГУАП, 2008, 332 с.
3.
В. П. Дьяконов. MATLAB 6.0/6.1/6.5/6.5 + SP1 + Simulink
4/5. Обработка сигналов и изображений. М.: СОЛОН-Пресс, 2004. - 592 с.
4.
В. П. Дьяконов. Matlab 6.5 SP1/7 + Simulink 5/6 в математике и
моделировании. М.: СОЛОН-Пресс, 2005. - 576с.