Ружицкая Е.А.
Гомельский государственный университет им.
Ф.Скорины, Гомель, Беларусь
Классическая задача регулирования для системы
с нелинейным входом
Задача регулирования
состоит в построении управления типа обратной связи, которое переводит систему
из одного состояния равновесия в другое и стабилизирует ее относительно нового
состояния. В [1] методами оптимального управления была решена классическая
задача регулирования для линейной системы. Цель данной работы – описать метод
решения этой задачи в классе ограниченных управляющих воздействий для
нелинейной системы с обеспечением дополнительных свойств переходных процессов. Этот
метод основан на кусочно-линейной аппроксимации исходной задачи и построении
реализаций стабилизирующих обратных связей для кусочно-линейных систем.
Пусть движением
материальной точки массы m при ![]() управляют с помощью магнита
[2] (рис. 1):
управляют с помощью магнита
[2] (рис. 1):
 . (1)
. (1)
Здесь ![]() – положение точки в
момент времени t,
– положение точки в
момент времени t, ![]() – её скорость,
– её скорость, ![]() – значение ограниченного
скалярного управляющего воздействия (
– значение ограниченного
скалярного управляющего воздействия (![]()
![]()
![]() ). Введем множество состояний равновесия системы (1):
). Введем множество состояний равновесия системы (1): 
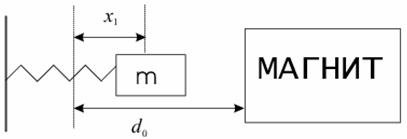
Рис. 1
Пусть ![]()
![]() . Функцию
. Функцию
![]() (2)
(2)
назовем дискретной (с периодом
квантования h>0) ограниченной стабилизирующей
обратной связью для состояния равновесия z
системы (1) в области G, если: 1) ![]() 2)
2) ![]()
![]() 3) замкнутая система
3) замкнутая система
 (3)
(3)
имеет решение ![]() 4) траектория системы
(3) представляет собой непрерывное решение уравнения
4) траектория системы
(3) представляет собой непрерывное решение уравнения

с управляющим воздействием ![]()
![]() k=0,1,2,…; 5)
движение
k=0,1,2,…; 5)
движение ![]()
![]() системы (3) асимптотически
устойчиво в G.
системы (3) асимптотически
устойчиво в G.
Требуется ограниченным
управляющим воздействием перевести материальную точку из начального состояния в
окрестность состояния равновесия ![]() так, чтобы не
нарушалось фазовое ограничение
так, чтобы не
нарушалось фазовое ограничение ![]() (точка не должна
коснуться магнита), и стабилизировать систему (1) в окрестности этого состояния.
(точка не должна
коснуться магнита), и стабилизировать систему (1) в окрестности этого состояния.
Для построения
ограниченной стабилизирующей обратной связи используется метод построения
реализации оптимальных обратных связей, описанный в [3], [4]. При этом подходе структура
обратной связи не задается, необходимые её значения вычисляются в реальном
времени по ходу каждого конкретного процесса управления, и естественным образом
учитываются ограничения на управляющие воздействия. Предлагаемый метод основан
на использовании позиционных решений вспомогательных задач оптимального управления,
которые вводятся с учетом ограничений исходной задачи управления.
Для решения поставленной
задачи введем кусочно-постоянную аппроксимацию системы (1), заменив нелинейную
характеристику  на кусочно-постоянную
функцию
на кусочно-постоянную
функцию ![]() Можно добиться сколь
угодно высокой точности аппроксимации, но для начала ограничимся самой грубой. В
качестве G возьмем область:
Можно добиться сколь
угодно высокой точности аппроксимации, но для начала ограничимся самой грубой. В
качестве G возьмем область:
![]() (4)
(4)
Разобьем (4) на
подобласти ![]()
![]()
![]() где
где ![]() и положим
и положим ![]()
![]()
![]()
![]()
![]() Здесь
Здесь ![]()
![]() – постоянные значения
выбранной аппроксимации функции
– постоянные значения
выбранной аппроксимации функции  в соответствующих
областях.
в соответствующих
областях.
Динамическую систему ![]() назовем линейной аппроксимацией
системы (1).
назовем линейной аппроксимацией
системы (1).
Выберем число ![]() ,
, ![]() (параметр метода) и в
классе дискретных управляющих воздействий
(параметр метода) и в
классе дискретных управляющих воздействий ![]()
![]() k=0,1,2,…N-1, рассмотрим вспомогательную задачу оптимального
управления
k=0,1,2,…N-1, рассмотрим вспомогательную задачу оптимального
управления
![]()
![]() (5)
(5)
![]()
![]()
![]()
![]()
![]()
![]()
Пусть ![]() – начальное состояние системы в задаче (5),
– начальное состояние системы в задаче (5), ![]()
![]() – оптимальное программное управление задачи (5),
– оптимальное программное управление задачи (5),
![]() – множество точек
– множество точек ![]() для которых существует решение задачи (5).
для которых существует решение задачи (5).
Функцию
![]() (6)
(6)
назовем оптимальным (стартовым)
управлением типа обратной связи. Можно показать [1], что функция (6) является
дискретной ограниченной стабилизирующей обратной связью для состояния z.
Описываются
два способа построения ограниченной стабилизирующей обратной связи (6) и
алгоритмы работы стабилизатора (устройства, которое может генерировать значения
стабилизирующей обратной связи по ходу каждого конкретного процесса управления).
При этом выполняются дополнительные ограничения на траекторию системы
управления.
При
решении задачи были выбраны следующие параметры системы (1) [2]: ![]()
![]() c=0.6590, k=38.94,
c=0.6590, k=38.94, ![]() m=1.54.
m=1.54.
Полученные
результаты сравниваются с результатами работы [2] и показывают эффективность
предложенного метода реализации дискретной обратной связи, которая позволяет
существенно улучшить переходные процессы в системе и достичь гораздо большей
области притяжения состояния равновесия.
ЛИТЕРАТУРА
1. Габасов Р., Кириллова
Ф.М., Ружицкая Е.А. Решение классической задачи регулирования методами
оптимального управления // АиТ. – 2001. – №6. – С.18–29.
2. Gilbert E.G., Kolmanovsky I. A generalized reference governor for
nonlinear systems // Proceedings of the 40th IEEE Conference on Decision and
Control,
3. Габасов Р., Кириллова
Ф. М. Оптимальное управление в режиме реального времени // Вторая международная
конференция по проблемам управления (17-19 июня 2003 года): Пленарные доклады. –
М.: Институт проблем управления, 2003. – C.20–47.
4. Gabasov R., Kirillova F.M. and N.V. Balashevich. On the synthesis
problem for optimal control systems // SIAM J.Control Optim, 2000. – Vol.39. –
№4. – P.1008–1042.