Секція «Технічні науки», підсекція: «Транспорт»
Божок А.М., Понеділок В.Ф.
Подільський державний
аграрно-технічний університет
ПРИСТРІЙ
АВТОМАТИЧНОГО ПІДРЕСОРЮВАННЯ СИДІННЯ ТРАНСПОРТНИХ ЗАСОБІВ
Гасіння коливань
сидіння сучасних транспортних засобів (ТЗ) здебільшого основане на перетворенні
кінетичної енергії його рухомих мас в теплову з подальшим розсіюванням її за
допомогою сухого тертя (фрикційні) або за допомогою рідинного тертя
(гідравлічні амортизатори). На сучасному рівні техніки знайшли застосування
гідравлічні амортизатори як компактніші, гнучкіші в регулюванні і мають
стабільнішу характеристику в широкому діапазоні змінювання частоти коливань.
Однак, не зважаючи на досягнутий рівень досконалості, вони, як силові вузли,
малонадійні, і в процесі експлуатації тертьові пари форсовано зношуються, що суттєво
знижує ефективність їх дії. Тому подальше удосконалення підвісок сидіння
висуває принципово нові вимоги як до їх схемних, так і до конструктивних
рішень. При цьому одним із ефективних шляхів удосконалення є розробка і
впровадження пристроїв, що працюють за принципом комбінованого регулювання,
основаного на формуванні сигналів компенсації коливання сидіння ще до того
моменту, як вони до нього поступлять.
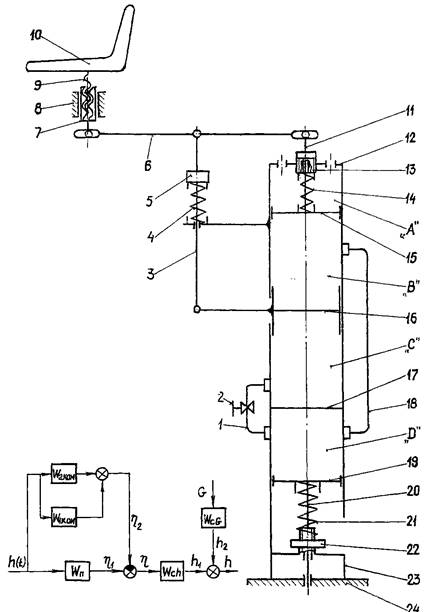
На рис.1,а показана принципова схема такого пристрою.
Він складається з блоків: І – приймання з боку рельєфу збуруючих поштовхів та
ударів, що діють на колеса ТЗ; ІІ – перетворення вхідних сигналів на
пропорційні змінюванню поштовхів та ударів і швидкості їх змінювання; ІІІ –
підсумовування вихідних перетворених сигналів.
У випадку
раптового наїзду коліс ТЗ на підвищену над поверхнею перешкоду та від дії на
сидіння ваги водія, тиск робочої рідини в гідро порожнинах “D”, “C” різко
підвищиться. Але із-за наявного дросселя 2 робоча рідина з порожнини “D” через
гідролінію 1 в
гідропорожнину “C” буде перетікати в незначній кількості, а в основному через гідролінію 18 буде перетікати в гідропорожнину
“B”, різко підвищуючи в ній
тиск. При цьому один кінець підсумовуючого важеля 6, зв’язаний через шток 11 з
верхнім рухомим фланцем 15, здолавши зусилля пружини 14, різко переміститься
вгору на порівняно більшу відстань, ніж його середня частина, зв’язана через
тягу 3 з
а) Рис.1. Схема пристрою автоматичного підресорювання сидіння транспортних
засобів: а) принципова; б) структурна: 1,18 – гідролінії; 2 – регулювальний дросель; 3
– тяга; 4,14,21 – пружини; 5,13,22 – регулювальні гайки; 6 – підсумовуючий
важіль; 7 – стояк; 8 – напрямна;9 –
гвинтовий механізм; 10 – сидіння; 11, 20 – штоки; 12 – кришка; 15, 16, 19 –
рухомі поршні; 17 – перегородка; 23 – корпус; 24 – рама; “A”, “B”, “C”,
“D” – гідропорожнини.
 середнім рухомим фланцем 16.
середнім рухомим фланцем 16.
б)
 Від виниклого перекосу
підсумовуючий важіль 6 сидіння 10, зв’язане з його другим кінцем, буде, не
зважаючи на наїзд коліс на підвищену перешкоду, займати за висотою попереднє
положення. І чим різкішим буде удар на колеса з боку перешкоди, тим різкіше
сидіння буде повертатись у своє попереднє положення. В даному випадку в точці
підсумовуючого важеля, зв’язаній з сидінням 10, має місце віднімання
переміщень, пропорційних змінюванню вхідної дії на колеса і швидкості її
змінювання, тобто її першої похідної.
Від виниклого перекосу
підсумовуючий важіль 6 сидіння 10, зв’язане з його другим кінцем, буде, не
зважаючи на наїзд коліс на підвищену перешкоду, займати за висотою попереднє
положення. І чим різкішим буде удар на колеса з боку перешкоди, тим різкіше
сидіння буде повертатись у своє попереднє положення. В даному випадку в точці
підсумовуючого важеля, зв’язаній з сидінням 10, має місце віднімання
переміщень, пропорційних змінюванню вхідної дії на колеса і швидкості її
змінювання, тобто її першої похідної.
Під дією зрівноважувальних
пружин 4, 14 і внаслідок вирівнювання тисків в гідропорожнинах “B”, “C”, “D”, підсумовуючий важіль 6
плавно займе своє горизонтальне положення в усталеному, без дії перешкод, русі
ТЗ.
При раптовому наїзді коліс на впадину і внаслідок
різкого опускання рами ТЗ автоматичний пристрій буде працювати аналогічно, лише
з тією різницею, що всі його рухомі деталі, а разом з ними і сидіння, будуть
переміщуватись у зворотному напрямі. В даному, як і в попередньому випадку, в
точці підсумовуючого важеля, зв’язаній з сидінням, також будуть відніматися два
переміщення: переміщення, пропорційне величині зміни у зворотному напрямку
вхідної дії на колеса, і швидкості її зміни, тобто має місце поєднання
динамічного гасіння коливань сидіння з кінематичною компенсацією відхилення
його рівня.
Якщо ТЗ буде
рухатись по поверхні без вертикально розміщених перешкод, то в результаті дії зрівноважувальних
пружин 4, 14 і вирівнювання тисків робочої рідини в гідропорожнинах “B”, “C”, “D”, підсумовуючий важіль 6 і
сидіння 10 займатимуть горизонтальне положення.
У випадку
повільного піднімання або опускання коліс і рами ТЗ також повільно будуть
змінюватись тиски в гідропорожнинах “C”, “D”. В результаті робоча рідина
з нижньої “D” в гідропорожнини “B”, “C”, і навпаки, буде перетікати
практично з однаковою швидкістю, чим забезпечиться можливість рухомим поршням
15, 16 і, зв’язаним з ними штокам 3, 11, переміщуватися з однаковою швидкістю,
а, з’єднаному з ним підсумовуючому важелю 6,
- паралельно вхідному положенню. В даному випадку компенсація можливого
відхилення у переміщенні підсумовуючого важеля 6 і сидіння 10 буде
здійснюватися лише одним сигналом, пропорційним величині дії перешкоди.
Отже, в
запропонованому пристрої положення, що займає сидіння 10 до і після дії на
колеса ТЗ будь-якого за знаком і характером зовнішнього збурення з боку
вертикально розміщених перешкод, змінюватись не буде.
Ступінь впливу на
відхилення сидіння компенсаційної складової, пропорційної швидкості змінювання
вхідної дії на колеса з боку перешкод в залежності від ваги водія і характеру збурення,
можна регулювати дроселем 2 шляхом
змінювання гідравлічного демпфування. З його збільшенням ступінь
компенсації відхилення сидіння збільшується, а із зменшенням – зменшується.
Висота розміщення сидіння 10, відповідно до зросту водія, регулюється гвинтовим механізмом 9.
На рис. 1,б показана, необхідна для
дослідження, структурна схема
автоматичного пристрою, на якій представлені передаточні функції: сидіння, як
об’єкта регулювання по каналу дії з боку перешкоди - ![]() і дії ваги водія -
і дії ваги водія - ![]() , штатної підвіски -
, штатної підвіски - ![]() і динамічних ланок
обвідного компенсаційного контуру -
і динамічних ланок
обвідного компенсаційного контуру - ![]() і
і ![]() . Вхідною координатою є збурення
. Вхідною координатою є збурення ![]() з боку перешкоди на поверхні дороги і вага водія
з боку перешкоди на поверхні дороги і вага водія ![]() , а вихідною – переміщення сидіння
, а вихідною – переміщення сидіння ![]() . Координати зв’язку
. Координати зв’язку ![]() - відповідно вихідне і вхідні переміщення крайніх і середньої
точок підсумовуючого важеля;
- відповідно вихідне і вхідні переміщення крайніх і середньої
точок підсумовуючого важеля; ![]() - переміщення сидіння відповідно результативне і спричинене
дією з боку перешкоди і ваги водія.
- переміщення сидіння відповідно результативне і спричинене
дією з боку перешкоди і ваги водія.
Із схеми видно,
що запропонований пристрій автоматичного підресорювання сидіння може бути
реалізований шляхом паралельного приєднання двох динамічних ланок: підсилюючої
- ![]() та інерційної першого
порядку -
та інерційної першого
порядку - ![]() , з утворенням інтегро-диференціюючої ланки, що має
переважаючі властивості інтегруючої ланки [1]. Принциповою схемою
підтверджується можливість технічної реалізації такої ланки.
, з утворенням інтегро-диференціюючої ланки, що має
переважаючі властивості інтегруючої ланки [1]. Принциповою схемою
підтверджується можливість технічної реалізації такої ланки.
Таким чином,
запропонований пристрій, у порівнянні з уже відомими, простіший за
конструкцією, менш матеріалоємний і може бути використаний на сучасних ТЗ для
покращення комфорту водіям і пасажирам.
Пристрій
захищений а.с. СРСР № 1639997.
Література
1.
Бесекерский В.А., Попов Е.П. Теория систем
автоматического регувлирования. 2-е изд. исправ. и доп. – М.: Наука, 1972. –
768 с.
Автори:
А.М. Божок
В.Ф. Понеділок