Кайнарбеков
А., Бекмамбет К.М., Асемханулы А.
Алматы,
Республика Казахстан
УНИВЕРСАЛЬНО ШАГАЮЩЕЕ КОЛЕСО
ТРАНСПОРТНЫХ СРЕДСТВ
Ранее было
изложено [1], как осуществляется устранение дефекта походки цельно выполненного
шагающего колеса путем удлинения голенного звена «Г» по отношению к бедренному
звену «Б» так, чтобы в начале шагового режима шагающее колесо становилась на
двух ногах 1 и 2 (рис.1). Начиная с этого момента, часть веса G начнет
нагружать наступившую ногу 2. Причем, вес удерживается на двух ногах и при
движении ступицы «О» проекция его распределяется между двумя направлениями а1,
а2, а3,… а7 и 11, 22, 33, … 77 по принципу параллелограмма (рис.37).
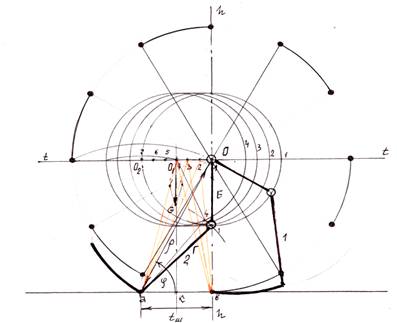
Рисунок
1. Схема к расчету
Значения
проекции силы веса G на направления
стягивающих линий а1, а2, а3, … а7 наступившей ноги 2 растут от нуля до
значения веса G, а значения на направления стягивающих линий 11,
22, 33, … 77 первой ноги 1 – уменьшаются от значения G
до нуля. Этот процесс зависит от длины бедренного звена «Б» и от длины
голенного звена «Г» известно, что более оптимальные значения этого отношения
находятся в пределах:
![]()
Длина просвета
колеса Н равна:
![]() =0,866r.
мм
=0,866r.
мм
Для установки в
коленном шарнире «К» упругого элемента, удерживающего нарастающую проекцию силы
веса G по стягивающими линиям, пропорциональными значениям
деформации упругого элемента, нужно знать несколько значений деформаций
упругого элемента, соответствующих нескольким значениям проекции силы веса G.
А затем, путем
построения диаграммы «сила-деформация» определяется жесткость упругого
элемента.
На рисунке 2.
показано это построение, которое заключается в следующем:
Центр ступицы О
колеса будем перемещать из первого положения влево до седьмого положения
равномерно, останавливаясь на каждом положении 2, 3, 4, 5, 6, 7, равноотстоящих
друг от друга. При этом диада «ока» будет двигаться, занимая соответствующие
семь положении схемы механизма «бедро-голень».
Длину
стягивающих линий обозначим через вектор ![]() и определим их
длины:
и определим их
длины:
![]()
![]()
![]()
![]()
![]()
![]()
где углы - ![]()
![]() …
… ![]() неизвестные.
неизвестные.
Рисунок
2. Схема к расчету
Поэтому,
определим значения этих углов:
![]() ;
;
где ![]()
тогда: ![]()
![]()
![]()
![]()
……..,
![]()
![]()
Тогда: ![]() мм.
мм. ![]()
![]()
………..,
![]()
Разность ![]() изменяется пропорционально величине
стягивающих линий и, следовательно, пропорционально деформации упругого
элемента
изменяется пропорционально величине
стягивающих линий и, следовательно, пропорционально деформации упругого
элемента ![]() т.е.:
т.е.:
![]() мм
мм
![]() мм
мм
![]() мм
мм
![]()
![]() мм.
мм.
Величина
проекции силы веса G соответствующей
каждому положению диада определяется как первая составляющая параллелограмма:
![]()
![]()
![]()
![]()
![]()
![]()
![]() .
.
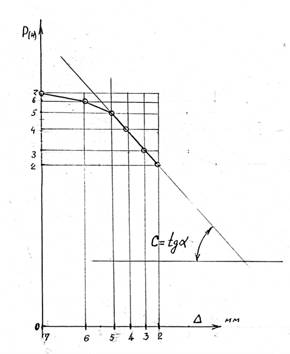
Диаграмма
зависимости Р = Р (![]() ) на
координатной системе «Сила-деформация» показана на рисунке 3.
) на
координатной системе «Сила-деформация» показана на рисунке 3.
Как видно из
диаграммы зависимость между силой Р и деформацией ![]() упругого элемента является не линейной
функцией.
упругого элемента является не линейной
функцией.
Причем, вначале
требуется установить упругий элемент большей жесткости, т.е.:
![]() н/мм,
н/мм,
а в конце хода
диады (в шестом и седьмом положениях) требуется более мягкая жесткость.
Выполнить такую
характеристику упругого элемента не так просто. Поэтому, придется ставить
упругий элемент с жесткостью С = ![]() как показано на рисунке 3.
как показано на рисунке 3.
При этом центр
ступицы «О» шагающего колеса в шестом и седьмом положениях будет приподниматься
выше прямолинейной траектории.
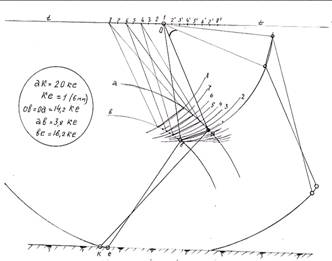
Рисунок 3. Схема
к расчету
Цельно
выполненные шагающие колеса конструктивно просты, но дефект походки, заключающийся
в падении с одной ноги на другую, при езде ограничивает область применения их в
конструкциях транспортных средств.
Увеличение длины
шага в колесном режиме и соответственно, уменьшение длины шага в шагающем
режиме уменьшает указанный дефект, но при этом шагающее колесо по
конструктивному признаку приближается к обычному колесу с круглым ободом и
повторяет недостатки общеизвестного пневмоколеса. Увеличение количества ног
также приведет к признакам походки колеса с круглым ободом.
Установка ступням
шагающего цельно выполненного шести ножного колеса фалангов, для уменьшения
высоты падения, конструктивно усложняет стопы ног, которые и так перегружены.
Установка на пятки ног упругого каблука, также смягчает падение ударного
приземления наступающей ноги, но дефект походки полностью не устраняется по
причине нелинейности жесткостной характеристики упругого элемента, который
нужно устанавливать, чтобы полностью устранить дефект походки.
Установка
упругого элемента в область коленного шарнира универсального шагающего колеса,
как было изложено [2], также полностью не устраняет указанный дефект в силу
нелинейности жесткости требуемого упругого элемента.
Остается еще
одна попытка полного исправления дефекта походки шагающего колеса. Это –
установка в конструкции универсального шагающего колеса
прямолинейно-направляющего четырехзвенного рычажного механизма для выполнения
шагового режима походки.
На рисунке 3
показана кинематическая схема прямолинейно – направляющего четырехзвенника
Оавке, который получен путем добавления одного рычага «ве» в схему механизма
универсального шагающего колеса рис.2.
Для шатунной
плоскости четырехзвенника Оав использована ступица колеса (рис. 2), а
неподвижное звено «ке» выполнено в теле ступни, т.е. направляющий
четырехзвенник встроен в конструкцию универсально - шагающего колеса (рис.3).
Полная схема
механизма данного шагающего колеса с шаговым механизмом показано на рисунке 3.
Универсально
шагающее колесо (рис.4) с шаговым механизмом полностью устраняет дефект
походки, т.е. при перекатывании по твердой и ровной поверхности дороги, походка
приравнена к походке круглого пневмоколеса.
При
перекатывании по неровной поверхности дороги оно превзойдет общеизвестное
пневмоколесо по показателям проходимости, энерго - экономичности и комфортности езды.
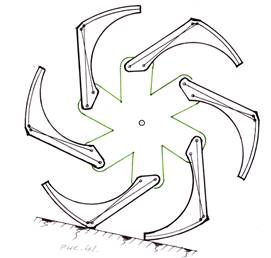
Рисунок 4. Универсально шагающее колесо
ЛИТЕРАТУРА
1. Кайнарбеков А., Бекмамбет К., ., Асемханулы А. Конструктивная схема универсального шагающего
колеса/ Журнал «Промышленный транспорт Казахстана», 2017 г, №2 (55) ,
с.44-48, г Алматы
2.
Муратов А.,
Сериккулова А.К., Асемханулы А. Транспортное средство с шагающим колесом для
езды по каменистым поверхностям/ Журнал «Промышленный транспорт
Казахстана», 2017 г, №3 (56) , с.99-103, г Алматы.
3.
Омаров А.Д.,
Муратов А., Кайнарбеков А., Бекмамбет К.М. «Бездорожное транспортное средства»:
г. Алматы, 2015г. 182стр.