Строительство и архитектура/3.
Современные технологии строительства реконструкции и реставрации
Профессор
Бубнович Э.В., магистрант Бондаренко Д.М.
Казахстанский
национальный технический университет им.К.И.Сатпаева
К вопросу
об уравнениях колебаний радиальных вантовых систем
Рассматривается
пологая двухпоясная радиальная вантовая система кругового очертания в плане.
Различные виды таких систем (рис.1-3) не отличаются друг от друга как с точки
зрения статического, так и динамического расчета. Континуальная модель каждого
из поясов радиальных вантовых систем представляет собой однопараметрическое
семейство нитей, закрепленных в наружном опорном контуре и внутреннем кольце.
Связи между напрягающими и несущими вантами считаются недеформируемыми и
непрерывно распределенными. Внутренние кольца имеют конечные размеры, однако их
изгибной жесткостью и горизонтальными силами инерции будем пренебрегать. 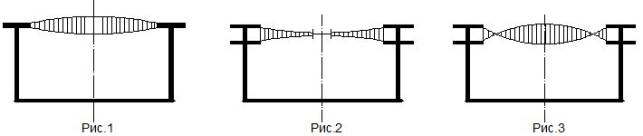
Нити обоих поясов, при
отсутствии тангенциальных компонент внешней нагрузки, направлены вдоль
геодезических линий кривизны соответствующей поверхности, а усилия в каждой из
них постоянны. Таким образом, нити радиальной системы образуют семейство
геодезических линий кривизны, чем и объясняется их высокая экономичность: при
прочих равных условиях теоретический вес радиальной системы в полтора раза
меньше, чем ортогональной сетки.[2]
Дается вывод
обыкновенных дифференциальных уравнений колебаний радиальной вантовой системы,
рассматриваемой как система с двумя степенями свободы.
В качестве системы
координат принимаются полярные координаты (![]() ) с полюсом, совпадающим с проекцией
на эту плоскость узлов верхнего и нижнего поясов.
) с полюсом, совпадающим с проекцией
на эту плоскость узлов верхнего и нижнего поясов.
Основное
дифференциальное уравнение колебаний двухпоясной радиальной вантовой системы
при отсутствии тангенциальных компонент внешней нагрузки имеет вид: [1]
 (1)
(1)
где
![]()
![]() ; (2)
; (2)
![]() ;
;
![]() и
и ![]() - усилия в несущих и напрягающих вантах соответственно,
относящиеся к полоске полярного угла
- усилия в несущих и напрягающих вантах соответственно,
относящиеся к полоске полярного угла ![]() = 1, т.е. к сектору, содержащему определенное постоянное число
нитей;
= 1, т.е. к сектору, содержащему определенное постоянное число
нитей;
![]() и
и ![]() - усилия предварительного напряжения;
- усилия предварительного напряжения;
![]() и
и ![]() - кривизны начальных линий равновесия вант;
- кривизны начальных линий равновесия вант;
![]() и
и ![]() - жесткость нитей на растяжение;
- жесткость нитей на растяжение;
![]() и
и ![]() - радиальные перемещения несущих и
напрягающих вант;
- радиальные перемещения несущих и
напрягающих вант;
w – прогиб сетки; ![]() – равномерно распределенная статическая
нагрузка;
– равномерно распределенная статическая
нагрузка; ![]() - вес внутренних колец (барабана) на единичный полярный угол;
- вес внутренних колец (барабана) на единичный полярный угол; ![]() - осесимметричная динамическая нагрузка;
- осесимметричная динамическая нагрузка; ![]() – коэффициент демпфирования;
– коэффициент демпфирования; ![]() – ускорение силы тяжести.
– ускорение силы тяжести.
Благодаря отсутствию связи между вантами в кольцевом направлении
структура уравнений (1) и (2) такова,
что угловая координата ![]() играет роль параметра.
играет роль параметра.
Аппроксимирующую функцию прогиба сетки примем в виде [2]

где ![]()
![]() , (k = 1,2,3,…) – статическое и
динамическое поперечные перемещения сетки;
, (k = 1,2,3,…) – статическое и
динамическое поперечные перемещения сетки; ![]()
![]()
![]() – радиус наружного опорного кольца;
– радиус наружного опорного кольца; ![]() - радиус внутреннего кольца.
- радиус внутреннего кольца.
Система координатных функций в (3) удовлетворяет условиям:
1)
все элементы
принадлежат гильбертову пространству Н;
2)
при
любом k ее
элементы линейно независимы;
3)
последовательность
функций полна в Н.
Подвергая (3) ортогонализации с весом ![]() и ограничиваясь первыми двумя членами ряда, будем иметь
и ограничиваясь первыми двумя членами ряда, будем иметь
![]()
Здесь ![]() =
= ![]() = const.
= const.
Из уравнений (2) найдем

где ![]() - произвольные функции времени, определяемые из нулевых граничных
условий на внутреннем контуре;
- произвольные функции времени, определяемые из нулевых граничных
условий на внутреннем контуре;
![]() =
= ![]()
![]() – начальные стрелки провеса несущих и напрягаемых вант, (i = 1,2).
– начальные стрелки провеса несущих и напрягаемых вант, (i = 1,2).
Принимая во внимание нулевые граничные условия на опорном
контуре и внося (4) в (5), приведем последние к виду
![]()
![]()
где ![]()
Подставляя (4) и (6) в уравнение (1) и применяя метод
Бубнова-Галеркина, приходим к системе двух нелинейных дифференциальных
уравнений, которые в матричном виде запишутся следующим образом:
![]() (7)
(7)
Здесь ![]()
![]()
представляют собой симметричные матрицы масс, вязкого
демпфирования и жесткости;
![]() {
{![]() };
};
![]() {
{![]() }
– векторы обобщенных координат и интенсивности динамической нагрузки;
}
– векторы обобщенных координат и интенсивности динамической нагрузки; ![]() – вектор нелинейного влияния равный:
– вектор нелинейного влияния равный:
![]()
![]()
 ,
,
![]() –
динамическая нагрузка.
–
динамическая нагрузка.
Коэффициенты в матрицах ![]() и векторах V и
и векторах V и ![]() имеют вид
имеют вид


![]()
![]()
![]()
![]()
![]()

![]()
![]()
![]()
![]()

Величина статического прогиба ![]() определяется из кубического уравнения:
определяется из кубического уравнения:
![]()
в котором
![]()
![]() (9a)
(9a)
![]() ;
;
![]()
Из матричного уравнения (7) видно, что радиальная вантовая
система является полной системой, состоящей из нескольких (двух) парциальных
систем. Каждая парциальная система, соответствующая своей обобщенной
координате, обладает определенной собственной частотой, как система с одной
степенью свободы:
![]()
![]() (10)
(10)
Члены с ![]() и
и ![]() характеризуют связь между этими системами. При этом коэффициент
инерционной связи
характеризуют связь между этими системами. При этом коэффициент
инерционной связи ![]() определяется как:
определяется как:
![]()
а коэффициент упругой связи равен
![]() .
.
Из анализа влияния связи на собственные частоты вантовой
системы видно преобладание упругой связи, увеличение которой будет приводить к
удалению друг от друга собственных частот системы, а уменьшение – к их сближению.
Литература:
1.
Ивович
В.А., Динамический расчет висячих конструкций. М., Стройиздат, 1975.
2.
Бубнович
Э.В., Калдыгазов К.Б., Колебания вантовой сетки при воздействиях типа
сейсмических. Вестник КазНТУ им. К. Сатпаева. Алматы, 2014, №4.