К.т.н. Нєженцев О.Б.
Національний технічний університет України (КПІ)
Динамічні навантаження і втрати енергії при
гальмуванні противмиканням мостових кранів
Постановка проблеми. Процеси гальмування експлуатованих мостових кранів супроводжуються
великими динамічними навантаженнями і втратами енергії [1, 2]. Це обумовлено як
застарілими релейно-контакторними системами управління електроприводами кранів,
незадовільним технічним станом кранів, так і неоптимальними режимами їх роботи
(наприклад, масовим застосуванням гальмування противмиканням).
Головним недоліком
гальмування противмиканням є підвищені втрати енергії (що приблизно у три рази
перевищують, втрати при розгоні [3]) і підвищений нагрів двигунів, що суттєво
знижує їх довговічність. Повсюдне застосування гальмування противмиканням у
вантажопідйомних кранах призводить до значних втрат енергії, але до
теперішнього часу кількісним і якісним оцінкам втрат для кранових механізмів
практично не приділялося уваги.
Аналіз останніх публікацій. Роботи по дослідженню перехідних процесів кранів, як правило, присвячені
динамічним навантаженням, що визначаються за спрощеними моделями, які часто не
враховують такі важливі фактори як пружно-в'язкі властивості металоконструкції
крана, коливання вантажу, нелінійні механічні характеристики приводу і ін. Публікацій
по втратах енергії при гальмуванні кранів практично немає. Відсутні переконливі
методики розрахунку втрат енергії кранів, немає даних як по енергоспоживанню
кранів різної вантажопідйомності, так і втрат енергії при роботі кранів в
різних гальмівних режимах. Разом з тим, для автомобілів, тракторів і ін.
транспортних засобів витрати палива [2, 4 і ін.] є важливим показником
ефективності перехідних процесів.
Мета статті – розробка математичної
моделі крана, що дозволяє досліджувати динамічні навантаження і втрати енергії
в режимі противмикання з урахуванням всіх основних факторів електромеханічної системи «електропривод – металоконструкція, – вантаж».
Для досягнення поставленої мети мостовий кран був
представлений у вигляді трьохмасової розрахункової схеми (див. рис. 1), що
описується системою нелінійних диференціальних рівнянь [5, 6]
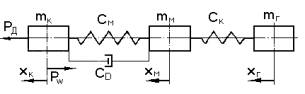
Рис.
1. Розрахункова схема мостового крана
 (1)
(1)
де
![]() - приведені до ходових коліс маса частини приводу, що обертається, і частина
маси моста;
- приведені до ходових коліс маса частини приводу, що обертається, і частина
маси моста; ![]() - приведена до середини прольоту маса середніх частин моста і візка;
- приведена до середини прольоту маса середніх частин моста і візка; ![]() - маса вантажу;
- маса вантажу; ![]() и
и ![]() - коефіцієнти жорсткості і затухання коливань металоконструкції крана в
горизонтальній площині;
- коефіцієнти жорсткості і затухання коливань металоконструкції крана в
горизонтальній площині; ![]() - горизонтальна складова натягу вантажних канатів при
- горизонтальна складова натягу вантажних канатів при ![]() ;
; ![]() – сила статичного опору пересуванню крана;
– сила статичного опору пересуванню крана; ![]() ,
, ![]() ,
, ![]() - шляхи, що проходять відповідні маси від початку координат;
- шляхи, що проходять відповідні маси від початку координат; ![]() – приведена до коліс сила приводу в режимі гальмування противмиканням [6]:
– приведена до коліс сила приводу в режимі гальмування противмиканням [6]:
 , (2)
, (2)
де ![]() ;
; ![]() - постійні для j-ой штучної характеристики
двигуна;
- постійні для j-ой штучної характеристики
двигуна; ![]() - критичний момент двигуна;
- критичний момент двигуна; ![]() - критичне ковзання на j-ой характеристиці;
- критичне ковзання на j-ой характеристиці; ![]() - швидкості пересування крана, відповідні синхронній і поточній
частотам обертання ротора;
- швидкості пересування крана, відповідні синхронній і поточній
частотам обертання ротора; ![]() - передаточне число приводу;
- передаточне число приводу; ![]() - радіус ходового колеса;
- радіус ходового колеса; ![]() - к.к.д. механізму.
- к.к.д. механізму.
На рис. 2 наведено
механічні характеристики електроприводу мостового крана в/п 20/5 т, де індекси
«в» відповідають руховому режиму, «пр» - режиму противмикання.
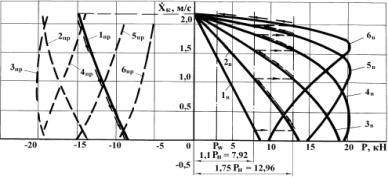
Рис. 2. Механічні характеристики приводу пересування
мостового крана
Втрати потужності в електроприводі пересування
крана при гальмуванні
![]() , (3)
, (3)
де ![]() - постійні втрати потужності
- постійні втрати потужності
![]() ; (4)
; (4)
![]() - втрати в сталі магнітопровода,
- втрати в сталі магнітопровода, ![]() - втрати в міді статора від струму
- втрати в міді статора від струму ![]() , що намагнічує ;
, що намагнічує ; ![]() - активний опір обмотки статора;
- активний опір обмотки статора; ![]() - механічні втрати від тертя в підшипниках;
- механічні втрати від тертя в підшипниках; ![]() - додаткові втрати
(приймаються рівними 0,5% від споживаної з мережі потужності),
- додаткові втрати
(приймаються рівними 0,5% від споживаної з мережі потужності), ![]() - втрати в приводі
штовхача гальма;
- втрати в приводі
штовхача гальма;
![]() - змінні втрати потужності
- змінні втрати потужності
![]() ; (5)
; (5)
![]() - змінні втрати в ланцюгах статора і ротора;
- змінні втрати в ланцюгах статора і ротора; ![]() – ковзання;
– ковзання; ![]() - приведений активний опір фази ротора, що складається з
опору обмотки ротора
- приведений активний опір фази ротора, що складається з
опору обмотки ротора ![]() і опору додаткових
резисторів
і опору додаткових
резисторів ![]() .
.
Сумарні втрати енергії в
приводі пересування крана
 , (6)
, (6)
де ![]() ,
, ![]() и
и ![]() - втрати енергії, що обумовлені постійними і змінними
втратами в статорі і роторі.
- втрати енергії, що обумовлені постійними і змінними
втратами в статорі і роторі.
Сумарні втрати енергії в режимі противмикання
 . (7)
. (7)
Перетворивши систему
рівнянь (1) і рівняння (7) отримаємо залежність для розрахунку втрат енергії
при гальмуванні крана в режимі противмикання

 . (8)
. (8)
Сумісне інтегрування системи диференціальних
рівнянь (1), з рівняннями (2) і (8) чисельним методом за допомогою розробленої
комп'ютерної програми [6] дозволяє з високою точністю розраховувати значення і
будувати графіки зміни втрат енергії, переміщень, швидкостей, прискорень,
навантажень металоконструкції і вантажу при гальмуванні крана.
На рис. 3 наведено графіки перехідних процесів при
гальмуванні противмиканням мостового крана в/п 20/5 т по різних
характеристиках.
а - по механічній характеристиці
3пр
б - по механічній характеристиці 5пр
Рис. 3.
Перехідні процеси при гальмуванні противмиканням крана в/п 20/5т
Результати досліджень, проведених за допомогою
розробленої математичної моделі, показали, що динамічні навантаження і втрати
енергії в приводі пересування крана суттєво залежать від виду
механічної характеристики, по якій здійснюється гальмування противмиканням. Так
максимальні динамічні навантаження на металоконструкцію крана Рм
(69,7 кН) і мінімальний час (2,68 с) виникають при гальмуванні крана по
механічній характеристиці 3пр, а мінімальні навантаження Рм (29,4
кН) і максимальний час гальмування (6,74 с) - по характеристиці 6пр.
Аналогічно змінюються навантаження, що діють на вантаж Рк,
відповідно 31,5 кН і 10,2 кН.
Запропонована математична модель дозволяє уточнити
спрощені уявлення про те, що втрати енергії не залежать від виду механічної
характеристики [2, 3 і ін.]. Втрати енергії склали від 487,1 кДж (гальмування
по механічній характеристиці 1пр) до 759,9 кДж (гальмування по
характеристиці 6пр) тобто відрізняються більш ніж в 1,5 разу (див.
рис. 4).
Розподіл між втратами в статорі і роторі двигуна
при гальмуванні противмиканням по різним механічним характеристикам показано на
рис. 4, де підтверджується положення про те, що втрати в статорі ![]() зворотньо пропорційні
величині опору в ланцюзі ротора
зворотньо пропорційні
величині опору в ланцюзі ротора![]() , тому втрати в статорі
, тому втрати в статорі ![]() при гальмуванні по
шостій механічній характеристиці в 15 разів вище за втрати при гальмуванні по
першій.
при гальмуванні по
шостій механічній характеристиці в 15 разів вище за втрати при гальмуванні по
першій.
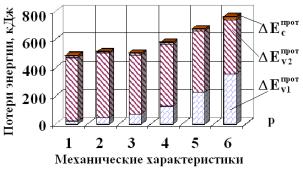
Рис. 4. Втрати енергії при гальмуванні
противмиканням крана в/п 20/5 т
Проведені дослідження підтвердили положення про те,
що застосування гальмування противмиканням значно знижує енергетичні показники
електроприводу крана. У зв'язку з цим гостро встає завдання застосування в
кранах енергозберігаючих систем управління. Оскільки найбільш ефективний привод
з частотним управлінням поки не набув масового поширення в Україні внаслідок недостатньої надійності в умовах підвищеної вібрації, температур і пилу, а
також підвищеної вартості, то доцільне застосування простих пристроїв динамічного
гальмування. Це дозволить значно знизити втрати енергії,
динамічні навантаження і зменшити розгойдування вантажу.
Висновки:
- розрахунки динамічних навантажень і втрат енергії
при гальмуванні мостових кранів необхідно здійснювати за допомогою математичних
моделей, що враховують всі основні параметри електромеханічної системи «привод
– металоконструкція, - вантаж», що дозволяє підвищити точність розрахунків, а
також - уточнити спрощені уявлення про незалежність втрат енергії від
механічних характеристик приводу, оскільки втрати енергії, отримані при
гальмуванні противмиканням мостового крана в/п 20/5т по різним механічним
характеристикам відрізняються більш ніж в 1,5 разів;
- зниження енергоспоживання вантажопідйомних кранів
треба проводити в комплексі із зниженням динамічних навантажень і підвищенням
продуктивності, що можливо шляхом застосування динамічного гальмування.
Література
1. Лобов Н.А. Динамика грузоподъемных кранов. - М.:
Машиностроение, 1987.
2. Гольстрем В.А., Кузнецов Ю.Л. Справочник по
экономии топливно-энергетических ресурсов. – К.: Техніка, 1985.
3. Ключев В.И. Теория электропривода. – М.:
Энергоатомиздат, 1985.
4. Говорущенко Н.Я. Экономия топлива и снижение
токсичности на автомобильном транспорте.- М.: Транспорт, 1990.
5. Будиков Л.Я., Нгуен Н.К., Неженцев А.Б.
Исследование динамики грузоподъемных кранов // Вестник машиностроения, №4. -
М.: Машиностроение, 1981, - с. 39-42.
6. Аветисян С.М., Неженцев А.Б. Программное
обеспечение для исследования переходных процессов грузоподъемных кранов (часть
1: при работе механизмов передвижения) // Підйомно-транспортна техніка, № 4(8).
- Днепропетровск, 2003. – с. 33-48.