УДК 621.01
ПЛАНЕТАРНО – ШАТУННОГО
МЕХАНИЗМА С
СОСТАВНЫМ ВОДИЛОМ
У.
П. Исоев, Б.Р.
Ахмадов, С.Саидамиров
Разработка
относится к машиностроению и может быть
применено в автотракторном машиностроении.
Цель
изобретения – повышение надежности механизма, производительности и обеспечение
большего КПД.
Предлагаемый
механизм в двух вариантах исполнения пояснен прилагаемыми кинетическими схемами
на Рис. 1 (вариант 1) и (вариант 2), где α - расстояние
смещения от центральной стойки.
Вариант
1. Устройство состоит из шарнирно соединенных всех деталей и узлов: солнечного
колеса 1, имеющего центр вращения - стойку 2, от которой со смещением на
расстоянии α расположена стойка
3. Стойка 3 является центром вращения двух составных водил, состоящих из двух
кривошипов 4, соединенных с двумя кулисами 6 посредством установленных в их
полостях ползунов 5, присоединенных к двум направляющим 7. Два сателлита 8 и 9
также имеют соединения с направляющими 7. Нижняя головка шатуна 10 соединена с
сателлитом 8, а ее верхняя головка с поршнем 11, расположенном в цилиндре 12.
Нижняя головка шатуна 13 соединена с сателлитом 9, а ее верхняя головка с
поршнем 14, расположенном в цилиндре 15.
Вариант
2. Устройство состоит из шарнирно соединенных всех деталей и узлов: солнечного
колеса 1, имеющего центр вращения - стойку 2, от которой со смещением на
расстоянии α расположена стойка
3. Стойка 3 является центром вращения двух составных водил, состоящих из двух
кривошипов 4, соединенных с двумя кулисами 6 посредством установленных в их
полостях ползунов 5, присоединенным к двум направляющим 7. Два сателлита 8 и 9
соединены с кулисами 6. Нижняя головка шатуна 10 соединена с сателлитом 8, а ее
верхняя головки с поршнем 11. Нижняя головка шатуна 13 соединена с сателлитом
9, а ее верхняя головка с поршнем 13. Оба поршня 11 и 13 расположены в цилиндре
12. Шатуны 10 и 13 снабжены пружинами 16.
Принцип
работы обоих вариантов механизма следующее: при вращении кривошипов 4 поршни 11
и 14 внутри цилиндров 12 и 15 (Рис. 1, вариант 1) или цилиндра 12 (вариант 2) совместно с направляющими 7,
расположенными внутри кулис 6, совершают возвратно-поступательные движения и
одновременно вращаются. При этом, сателлиты 8 и 9 перекатываются по солнечному
колесу 1. По первому варианту шатуны 10, 13 совершают плоскопараллельные
движения (Рис. 1). По второму варианту шатуны 10, 13 совершают поступательные
движения по вертикальной оси.
Преимущество:
1.
Получение переменные скорости и ускорение.
2.
Переменные передаточные отношения.
3.
Переменные параметры позволяет улучшить технологический процесс работы
механизма.
Угловая скорость кривошипа ![]() и сателлита согласно
с J равен
и сателлита согласно
с J равен![]()
 ;
;
 (1)
(1)
Угловая ускорения
кривошипа и сателлита равно
 ;
;
 (2)
(2)
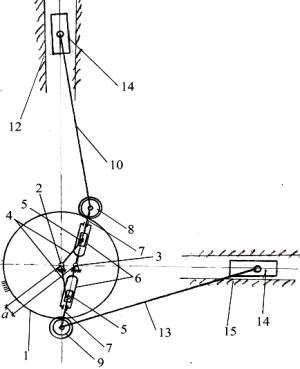
Рис.
1 Планетарно–шатунный механизм с составным водилом
Уравнения движения исследуемого механизма с учетом дифферен-
циального уравнения
движения Лагранжа II рода равен ![]()
 (3)
(3)
Уравнения (3) с
учетом уравнения (1), (2) и (4) имеет вид
![]()
![]() (4)
(4)
где переменные коэффициенты равны
 ;
;  ;
;  .
.
Уравнения (4) является нелинейное
уравнение дифференциальное уравнения движения исследуемого механизма второго
порядка, решение которого имеется возможность по методу Рунге-Кутта с помощью современное средства вычисления.
Решая уравнения (4) определим, параметры машинного агрегата
планетарных шатунных механизмов
позволяет проектировать по этим параметрам.
Литература
1.Техническая характеристика КС-2,1 и СК-5 и их
механизмы.М., 1975.
2. С. Тилоев Малый патент РТ Тj
157, бюл. 51.
3. Теория механизмов и машин. М., 1982, стр.
13.
Реферат
ПЛАНЕТАРНО – ШАТУННОГО МЕХАНИЗМА С
СОСТАВНЫМ ВОДИЛОМ
Разработка относится
к машиностроению и может быть применено в автотракторном машиностроении.
По первому варианту, в данном механизме
кривошип выполнен в виде солнечного колеса, имеющего центр вращения - стойку,
от которой со смещением на расстоянии α расположена стойка, являющаяся
центром вращения двух составных водил. Водила состоят из двух кривошипов,
соединенных с двумя кулисами посредством установленных в их полостях ползунов,
присоединенных к двум направляющим. К направляющим соединены два сателлита, к
которым присоединены нижние головки шатунов. Их верхние головки имеют
соединения с поршнями, расположенными соответственно в двух разных цилиндрах.
По второму варианту верхние головки
шатунов, снабженных пружинами, соединены соответственно с двумя разными
поршнями, расположенными в одном цилиндре.
Abstract
PLANETARNO - SHATUNNYY
MECHANISM WITH COMPONENT VODILOM
The Invention pertains to
machine building and can be aplying in автотракторном machine building.
On the first variant, in given
mechanism crank is executed in the manner of solar travell about, having centre
of the rotation - a rack, from which with offset on distance? the located rack,
being centre of the rotation two component vodila . Vodila consist of two cranks, united with two
wingses by means of installed in their cavity crawler, joined to two directing.
To directing united two satellite, to which are joined lower
heads connecting-rod. Their upper heads have a join with porches, located in two miscellaneous cylinder accordingly.
On the second variant upper
heads connecting-rod, supplied spring united accordingly with two miscellaneous
porches, located in one cylinder.