магистр Тилеукеев
Ж.А., магистр Семернин Н.А.
Таразский
государственный университет имени М.Х. Дулати, г. Тараз, Республика Казахстан
Динамические характеристики системы «Асинхронный двигатель с импульсным
регулированием» в среде MATLAB 5.2
Увеличение показателей надежности,
экономичности асинхронного двигателя может быть достигнуто импульсным
регулированием в среде MATLAB 5.2.
В системе «Асинхронный двигатель с
импульсным регулированием» ротор двигателя подключен к мостовому выпрямителю,
анодные и катодные выходы которого соединены с добавочным резистором.
Регулирование скорости добиваются увеличением добавочного сопротивления.
Неуправляемый выпрямитель преобразует
трехфазное переменное напряжение ротора в постоянное напряжение. Изменением
добавочного сопротивления на выходе выпрямителя изменяется ток выпрямителя и,
соответственно, ток ротора. Установившиеся значения тока для конкретного
значения добавочного сопротивления определяется нагрузкой на валу
электродвигателя и ЭДС ротора (см. рис. 1).
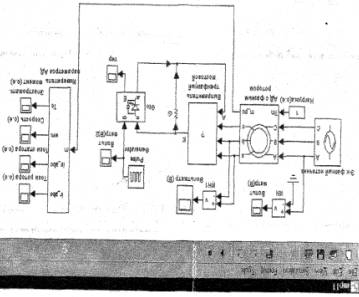
Рис. 1. Схема импульсного регулирования скорости
Модель системы имеет блок «Выпрямитель»,
который имеет маску, собранного из отдельных составляющих элементов: диодов,
соединительных узлов и блоков ввода и вывода. Собрав мостовую схему выпрямителя
и разместив ее в пустую маску, присваиваем элементам ввода и вывода имя
числового и буквенного значения (см. рис. 2).
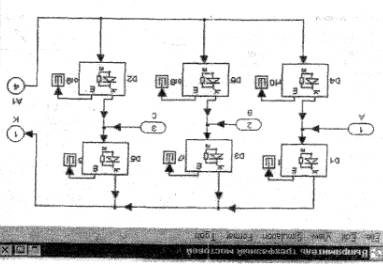
Рис. 2
Блок, внутри которого имеется схема и
обязательные элементы ввода и вывода, будет иметь число входов, равное числу
элементов ввода и, число выходов, равное числу элементов вывода. В блоке входы
и выходы будут располагаться сверху вниз, начиная от наименьшего числа или
последовательности в алфавите, буквы присвоения имени элемента ввода и вывода.
Если есть необходимость самостоятельного построения блока, то в разделе «DEMO» следует создать новую модель и открыть в этой модели
файл «Block.mdl». Этот файл
создан на основе библиотеки программы, поэтому пустой блок можно лишь
копировать на любую или вновь созданную модель. Результаты моделирования
приведены ниже.
Токи статора имеют номинальные значения,
соблюдена симметрия. График изменения токов во времени представлен на рисунке.
Частота токов ротора по мере возрастания скорости уменьшается от частоты сети
50 Гц до 1,5 Гц. В установившемся режиме скорость принимает значение с учетом
скольжения и значения добавочного сопротивления. График изменения токов ротора
представлен на рисунке 3.
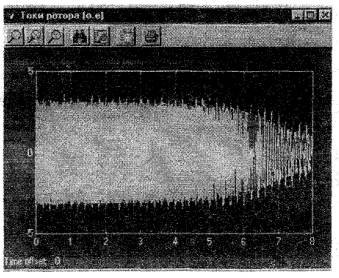
Рис. 3. График изменения токов ротора.
Скорость на валу увеличивается и
устанавливается в момент времени Т=2 с. График изменения скорости во времени
представлен на рисунке 4.
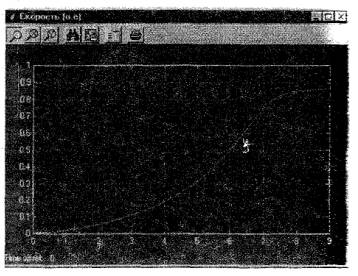
Рис. 4. График изменения скорости во времени
В системе имеется цепь выпрямленного тока,
которую тоже можно вывести на электроизмерительный прибор. В данной схеме
импульсного регулирования можно посмотреть момент инерции (см. рис. 5)
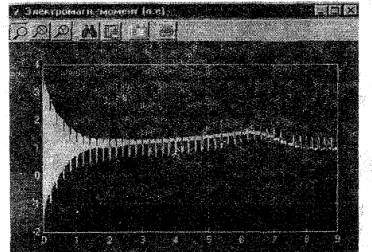
Рис. 5. Момент инерции в схеме импульсного
регулирования
Частота и амплитуда напряжения ротора
меняется с возрастанием скорости в меньшую сторону.
Блок «Выпрямитель мостовой» имеет в маске
схему, которая приведена на рисунке. Схема была собрана и, для удобства
моделирования, была скрыта под маской блоком. Элементы ввода обозначены числами
1, 2, 3, 4, а элемент вывода – числом 1, тогда в левой части блока будут иметь
место четыре входа, а в правой части блока – один выход, расположенные сверху
вниз по возрастанию обозначенных чисел на элементах ввода и вывода.
Таким образом, можно смоделировать не
только общую модель электропривода, но и задать нужные для исследования
параметры некоторых блоков.
Среда моделирования MATLAB 5.2 очень удобна для пользователей, работающих с
системами электроприводов различных модификаций.
Литература:
1. Москоленко В.В. Электрический привод. – М.: Высшая
школа, 1991. – 430 с.
2. Чиликин А.Г., Сандлер А.С. Общий курс
электропривода. – М.: Энергопромиздат, 1990. – 576 с.
3. Ключев В.И. Теория электропривода. – Л.:
Энергоатомиздат, 1985. – 560 с.