P.h.D. Kryuchin
O.V., Kryuchina E.I.
Tambov State University
named after G.R. Derzhavin
Adaptive resonance theory and its
implementation using artificial neural networks
The
human brain executes difficult tasks for analyzing the continuous thread of the
sensorial information which it receives from the environment. It distinguishes
important data from the thread of trivial information and adapts to the former.
Then usually it registers the important information in the long-term memory.
Understanding the process of the human memory is very difficult because new
patterns are memorized but old patterns are not forgotten or modified.
Many scientists have tried to analyze the working
process of the human brain using artificial neural networks (ANNs), but
traditional ANNs could not solve the problem of compatibility and plasticity.
Very often after adding new patterns, results of previous training are
destroyed or changed. Sometimes this is not important, for example if there is
a constant group of training vectors, as in this case the results can be
produced cyclically in the process of the training. In structures with
back-propagation training vectors are given to the input layer serially until
the network has been trained to all input of this group. But if a network which
was trained absolutely has memorized a new training vector then it can change
weights and the ANN will need new training [1, 2].
In
the real situation the network is subject to different stimuli and maybe it
never sees the same training vector twice. So the network often is not trained,
it changes weights but it cannot get good results. And there are networks which
cannot be trained if four training vectors are produced cyclically because
these vectors force weights to change without interruption [1].
This
actuality was one of reasons of the development of the adaptive resonance
theory (ART) in 1969. The ART is a theory developed by Stephen Grossberg and
Gail Carpenter on aspects of how the brain processes information. It describes
a number of neural network models which use supervised and unsupervised
learning methods and address problems such as pattern recognition and
prediction [3]. One of the main problems which are solved by ART-structures is
the classification.
The primary
intuition behind the ART model is that object identification and recognition
generally occur as a result of the interaction of “top-down” observer
expectations with “bottom-up” sensory information. The model postulates that
“top-down” expectations take the form of a memory template or prototype that is
then compared with the actual features of an object as detected by the senses.
This comparison gives rise to a measure of category belonging. As long as this
difference between sensation and expectation does not exceed a set threshold
called the “vigilance parameter”, the sensed object will be considered a member
of the expected class [4].
The basic ART
system is an unsupervised learning model. It typically consists of a comparison
field and a recognition field composed of neurons, a vigilance parameter, and a
reset module. The vigilance parameter has considerable influence on the system:
higher vigilance produces highly detailed memories (many, fine-grained
categories), while lower vigilance results in more general memories (fewer,
more-general categories). The comparison field takes an input vector (a
one-dimensional array of values) and transfers it to its best match in the
recognition field. Its best match is the single neuron whose set of weights
(weight vector) most closely matches the input vector. Each recognition field
neuron outputs a negative signal (proportional to that neuron quality of match
to the input vector) to each of the other recognition field neurons and
inhibits their output accordingly. In this way the recognition field exhibits
lateral inhibition, allowing each neuron in it to represent a category to which
input vectors are classified. After the input vector is classified, the reset
module compares the strength of the recognition match to the vigilance parameter.
If the vigilance threshold is met, training commences. Otherwise, if the match
level does not meet the vigilance parameter, the firing recognition neuron is
inhibited until a new input vector is applied; training commences only upon
completion of a search procedure. In the search procedure, recognition neurons
are disabled one by one by the reset function until the vigilance parameter is
satisfied by a recognition match.If no committed neuron's recognition match meets
the vigilance threshold, then an uncommitted neuron is committed and adjusted
towards matching the input vector see
also [5-6].
To
date only few types of ART networks have been developed. These networks
self-organize stable recognition categories in response to arbitrary sequences
of analog input patterns, as well as binary input patterns. Computer
simulations are used to illustrate the dynamics of the system [7].
ART
networks consist of two layers. These are the input layer of the comparation
which has L neurons and the output
layer of the clarication which has P neurons. Each neuron of
ithe nput layer is connected to each neuron of the output layer using ascendant
synaptic links (![]() ),
and each neuron of the output layer is connected to each neuron of the input
layer using descending links (
),
and each neuron of the output layer is connected to each neuron of the input
layer using descending links (![]() )
[8]. Figure 1 shows the ART structure in which the input layer (blue) has 8
neurons and the output layer (magenta) has 6 neurons.
)
[8]. Figure 1 shows the ART structure in which the input layer (blue) has 8
neurons and the output layer (magenta) has 6 neurons.
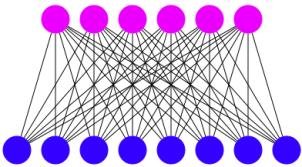
Figure
1: ART structure.
Literature
1.
Круглов В.В.
Искусственные нейронные сети // Москва. 2001. (Kruglov V.V. Articial
neural networks // Moscow. 2001.)
2.
Уоссермен Ф.
Нейрокомпьютерная техника // Москва. Мир, 1992. (Wosserman F.
Neurocomputer technica // Moscow. Mir. 1992.)
3.
Grossberg S. Adaptive Pattern Classicationand
Universal Recoding, Feedback, II: Expectation, Olfaction,and Illusions // Bioi.
Cybern. 23. 187 (1976).
4.
O'Meadhra, C.E.; Kenny, A.: Sensory Modal Switching.
Discussion Paper, Multisensory Design Research Group at the National College of
Art and Design 2011
5.
Carpenter G.A., Grossberg S. Category learning and
adaptive pattern recognition: a neural network model // Proceedings, Third Army
Conference Applied Mathematics on and Computing, ARO Report86-1 (1985), P.
37-56.
6.
Carpenter G. A. Grossberg S. Invariant pattern
recognition and recall by an attentive self-organizing ART architecture in a
nonstationary world // Proceedings rst international conference on neural
networks, San Diego (IEEE, New York,1987)
7.
Carpenter G.A., Grossberg S. ART 2: Self-organization
of stable category recognition codes for analog input patterns // Applied
Optics, 26(23), 1987. P. 4919-4930.
8.
Grossberg S. Competitive learning: from interactive
activation to adaptive resonance // CognitiveSci. 11, 23(1987).