MEL’NICK V.M.
NATIONAL TECHNICAL
UNIVERSITY OF UKRAINE "IGOR SIKORSKY KYIV POLYTECHNIC INSTITUTE"
ERRORS OF STABILIZATION
Linear approximation
![]() ;
; ![]() ;
;
![]() ;
; ![]() ; (1)
; (1)
![]() ;
; ![]() .
.
Here ![]() – linear
approximation solutions which did not take into account
the nonlinear members - gyroscopic moments of cross-links;
– linear
approximation solutions which did not take into account
the nonlinear members - gyroscopic moments of cross-links; ![]() – addition
to the solutions relatively the first,
etc. order infinitesimality.
– addition
to the solutions relatively the first,
etc. order infinitesimality.
With the rejection of nonlinear members
![]() ,
, ![]() ,
, ![]() , the equation of the system (6.1) can be
regarded as pairs of equation of three independent stabilization systems under the
influence of disturbances
, the equation of the system (6.1) can be
regarded as pairs of equation of three independent stabilization systems under the
influence of disturbances ![]() and
and ![]() . The reaction
of these disturbances is the solution of
the linear approximation
. The reaction
of these disturbances is the solution of
the linear approximation ![]() and
and ![]() .
.
After substituting of the expressions into the equation (6.1), we again obtain the linear
equations, but relatively
to variable ![]() and
and ![]() , structurally similar to the equations of linear approximation, although in the right sidewill be already present
, structurally similar to the equations of linear approximation, although in the right sidewill be already present ![]() ,
, ![]() and
and ![]() .
.
Assuming that the
values ![]() and
and ![]() much
smaller than the corresponding solutions of linear
approximation, we can write down –
much
smaller than the corresponding solutions of linear
approximation, we can write down –
![]() ;
;
![]() ;
;
![]() . (2)
. (2)
Thus, the task of finding the solutions of the first approximation is reduced again
to determinition of the reactions of two
independent
linear systems of perturbation ![]() and
and ![]() , caused by the
cross impact of the
stabilization channels.
, caused by the
cross impact of the
stabilization channels.
Similarly, if necessary,
we can find the second, third, etc. the following
approximation.
The first four equations of the system can be solved independently of the latter
two, so we will continue to
analyze the system from the
first four equations without studying of the GSP dynamics as a closed system. We conditionally assume the circles of stabilization as opened, however, we consider the platform small oscillations relatively to the axes![]() ,
, ![]() ,
, ![]() , which are responsible for stabilization errors.
, which are responsible for stabilization errors.
In the linear approximation equations the two channels
of stabilization fall into
the following two subsystems which are not connected
–
 (3)
(3)
 (4)
(4)
The reaction of GSP on periodic perturbations will contain forced and own oscillations. We assume that the latter ones will quickly die down.
Then the solutions of the systems
(3) and (4) at the harmonic
perturbations are easily obtained using the frequency chracteristics of the
system:
![]() ;
; ![]() ;
;
![]() ;
; ![]() , (5)
, (5)
where![]() ,
, ![]() ,
, ![]() ,
, ![]() – respectively the
amplitude-frequency characteristics and phase-frequent characteristics
of the tract between the input
influence and
the original value;
– respectively the
amplitude-frequency characteristics and phase-frequent characteristics
of the tract between the input
influence and
the original value; ![]() ;
; ![]() .
.
The structural schemes of the platform in
the linear approximation are shown in Fig. 1. Their corresponding transfer
functions of the platform are outlined by the correlations –
![]() ;
;![]() ;
;
 ;
;![]() ;
;
 ;
;
 ,
(6)
,
(6)
 (7)
(7)
From the expression (6.11) it follows, that the constant components of angle rate ![]() and
and ![]() are not shown by linear approximation.
are not shown by linear approximation.
Estimation
of the stabilization error in the first approximation. Now we consider the first
approximation. Substituting
(1), and taking into account (3) and (4), we obtain
a system of linear equations, where ![]() and
and ![]() are determined by the expressions (2):
are determined by the expressions (2):
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
(8)
.
(8)
Substituting in the expression (2) the solution (1) we find:
![]() ;
;
![]() .
.
Elementary transformations make possible to write these correlation as follows
–
![]()
![]() ;
;
![]()
![]() . (9)
. (9)
Perturbations of the sensstive GSP elements on the precession
axis will be the periodic
moments-obstacles of different![]() and
total
and
total ![]() frequencies. Consequently, the reaction of these perturbations
platform will have the same
structure (2, а).
frequencies. Consequently, the reaction of these perturbations
platform will have the same
structure (2, а).
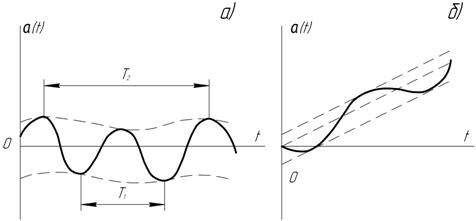 Fig. 2. Changes of inclination angles of the gyrostabilizer platform at different frequencies of exciting: а)
Fig. 2. Changes of inclination angles of the gyrostabilizer platform at different frequencies of exciting: а) ![]()
![]() б)
б) ![]()
At the frequencies equality, in other words, when ![]() , the expression (9) changes –
, the expression (9) changes –
![]()
![]()
![]() ;
;
![]()
![]()
![]() .
.
Obviously, there are
constant components of exciting moments relatively to
the output axis of gyroblocks –
![]() ;
;
![]() . (10)
. (10)
These constant components cause
the systematic drift of the platform relatively to
the axes of stabilization with the angle rate

![]() ;
;

![]() . (11)
. (11)
The character of the GSP movement when ![]() is shown in Fig. 2, б. Obviously,
the acoustic vibration of the surface float gyroscopic sensitive
elements, with a wide frequency range, will contain
in the values
is shown in Fig. 2, б. Obviously,
the acoustic vibration of the surface float gyroscopic sensitive
elements, with a wide frequency range, will contain
in the values ![]() ,
, ![]() the components of the frequencies
the components of the frequencies ![]() of the kinematic perturbation base. Thus, there
will be a selectivity of these variables and a systematic drift of the platform will
also contain the value of pressure
of sound radiation
of the kinematic perturbation base. Thus, there
will be a selectivity of these variables and a systematic drift of the platform will
also contain the value of pressure
of sound radiation
![]() . The frequencies, which do not match, will enrich the range
of harmonic components [1-3].
. The frequencies, which do not match, will enrich the range
of harmonic components [1-3].
If the difference between the frequencies
![]() and
and ![]() is large, the GSP errors have the oscillation origin of different oscillation and total frequencies.
When they are getting close to
each other, except the long periodic and short periodic components may occur beating.
is large, the GSP errors have the oscillation origin of different oscillation and total frequencies.
When they are getting close to
each other, except the long periodic and short periodic components may occur beating.
At synchronous tossing the GSP has
a systembothatic drift around all three axes
of stabilization. Their value depend on the origin of the perturbation and parameters
of the platforms which are contained in amplitude-frequent and phase-frequent characteristics, as well as
in values of the phase shift.
The estimation of the second approximation generates the confidence to believe that it’s enough to consider only the first
approximation.
The research has proven the
following: at the fuselage
tossing, the GSP gyroscopic sensitive elements in the acoustic fields of a supersonic flight
have the errors of measurement, which cause the construction errors of tryorthohonal coordinate system
for the aircraft; it is clarified the structure of construction errors in the coordinate system using GSP, which enables to
estimate the degree of influence
of kinematic and acoustic perturbations; it is
opened the mechanism of diffraction
of sound waves in mechanical
impedance systems of the gimbal in the inertial devices; the results
obtained may serve as a theoretical
basis of improvement the
accuracy of constructing the guide lines for
hypersonic vehicles of different
classes.
References
1. Mel'nik, V.N. Stress-strain state of a gyroscope
suspension under acoustic loading [Текст]/ V.N. Mel’nik // 2007; Strength of Materials.
ISSN: 00392316. Volume: 39. Issue:
1. Pages: 24-36. Year:
2007-01-01. EID: 2-s2.0-34147198666. Scopus ID:
34147198666. DOI: 10.1007/s11223-007-0004-6.
2. Mel'nik, V.N. Influence of acoustic
radiation on the sensors of
a gyrostabilized platform
[Текст]/ V.N. Mel’nik, V.V. Karachun//
2004; Prikladnaya Mekhanika.
ISSN: 00328243. Volume: 40. Issue:
10. Pages: 122-130. Year:
2004-12-01. EID: 2-s2.0-14844342416. Scopus ID:
14844342416.
3. Mel'nick, V.N. Determining Gyroscopic
Integrator Errors to Diffraction of Sound Waves [Текст] / V.N. Mel'nick,
V.V. Karachun // International Applied Mechanics.
-2004. –T. 40(3). – P. 328-336.
4. Karachun, V.V. Vibration of Porous. Plates
under the Action of Acoustic [Текст] / V.V.
Karachun // SOVIET APPLIED MECHANICS. – 1987. – Vol.
22, №3. – Р.
236-238.