д.т.н., доцент Стариченков А.Л.
Федеральное государственное бюджетное учреждение науки
Институт проблем транспорта им. Н.С.Соломенко Российской академии наук,
Санкт-Петербург, Россия
Оценка безопасности движения судов с
динамическими принципами поддержания на основе анализа их фазовых портретов
Проблема
безопасности движения морского подвижного объекта (МПО) непосредственно связана
с его устойчивостью. Оценку устойчивости движения судна целесообразно
осуществлять на основе анализа его фазового портрета, который позволяет
определить области устойчивых и неустойчивых движений рассматриваемого объекта,
а, следовательно, прогнозировать возможность попадания судна в аварийные
ситуации, связанные с потерей устойчивости. Математически данная задача
сводится к предотвращению возможности выхода изображающей точки фазового
пространства, характеризующей текущее состояние рассматриваемого объекта, за
границу области устойчивости, которая является функцией от коэффициентов
математической модели МПО [1]. Проблема прогнозирования устойчивости движения
особенно актуальна для судов с динамическими принципами поддержания (СДПП), к
которым относятся суда на подводных крыльях (СПК), суда на воздушной подушке
(СВП) и экранопланы. Данный класс судов среди других МПО отличают:
1.
более
высокие динамические характеристики, в том числе и с точки зрения процесса
развития аварийных ситуаций;
2.
более
глубокое и сложное взаимовлияние параметров пространственного положения;
3.
большее
число разнообразных исполнительных органов (ИО) со сложным характером их
взаимодействия;
4.
распределенный
характер гидродинамических сил и моментов.
В соответствии с
рекомендациями работы [2] примем для рассматриваемой схемы СПК концепцию
раздельного управления параметрами пространственного положения: параметрами
продольного движения – высотой и дифферентом – управляют кормовые внутренние и
носовые закрылки, а параметрами бокового движения – рысканьем и креном –
управляют руль направления и кормовые наружные закрылки соответственно.
Принятая структура дает возможность разделить вектор управления ![]() на вектор
на вектор ![]() управления продольным движением
управления продольным движением

и вектор ![]() управления боковым движением
управления боковым движением
 .
.
В дальнейшем под термином «движение» будем понимать только продольное движение СПК. Любой СПК является многорежимным МПО, т.к. имеет несколько режимов движения. В дальнейшем ограничимся рассмотрением движения СПК только в крыльевом (основном) режиме, учитывая то, что в рассматриваемом режиме можно выделить подрежим маневрирования, заключающийся в целенаправленном изменении курса, высоты движения, крена или дифферента, и подрежим стабилизации параметров положения. Анализ устойчивости движения СПК будем выполнять с помощью линеаризованной модели продольного движения рассматриваемого объекта в виде:
 , (1)
, (1)
где ![]() - угловая скорость килевой качки,
- угловая скорость килевой качки, ![]() - угол атаки,
- угол атаки, ![]() - угол дифферента,
- угол дифферента, ![]() - ордината центра масс СПК,
- ордината центра масс СПК, ![]() – числовые
коэффициенты.
– числовые
коэффициенты.
Анализ
устойчивости движения СВП в горизонтальной плоскости будем выполнять с помощью
взаимосвязанных нелинейных дифференциальных уравнений, описывающих процессы
рыскания и бокового сноса для рассматриваемого объекта, которые на основе
использования обобщенной математической модели морского подвижного объекта [3]
запишем в следующем виде:
 , (2)
, (2)
где ![]() – угловая скорость рыскания,
– угловая скорость рыскания, ![]() – углы дрейфа, курса и перекладки руля
соответственно,
– углы дрейфа, курса и перекладки руля
соответственно, ![]() – боковое отклонение
– боковое отклонение ![]() – числовые
коэффициенты, причем коэффициент
– числовые
коэффициенты, причем коэффициент ![]() - полином, аппроксимирующий присутствующую в
системе нелинейную гидродинамическую зависимость.
- полином, аппроксимирующий присутствующую в
системе нелинейную гидродинамическую зависимость.
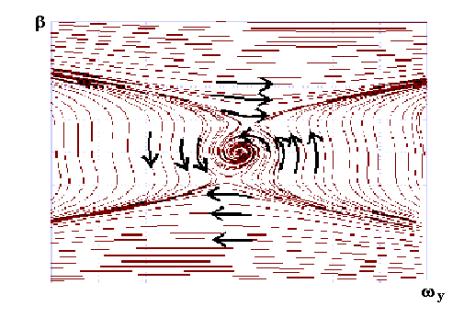
Решив системы
дифференциальных уравнений (1) и (2), мы можем построить фазовый портрет
горизонтального движения СВП в плоскости параметров состояния (wy, b) и фазовый портрет
продольного движения СПК в плоскости параметров состояния (wz, a), представленные,
соответственно, на рисунках 1 и 2.
Анализируя
данные рисунки, можно заметить, что фазовый портрет горизонтального движения
СВП содержит три точки равновесия: в начале координат находится «устойчивый
фокус», а в I и III квадрантах – неустойчивые точки равновесия типа
«седло». Таким образом, для СВП имеет место существование неустойчивого
предельного цикла, а область устойчивого движения судна находится в
ограниченной области изменения угла дрейфа (b) и скорости рыскания (wy ).
|
|
|
Рис.1. Фазовый портрет горизонтального движения
СВП в плоскости параметров состояния (wy, b) |
|
|
|
Рис.2. Фазовый портрет продольного движения СПК в
плоскости параметров состояния (wz, a) |
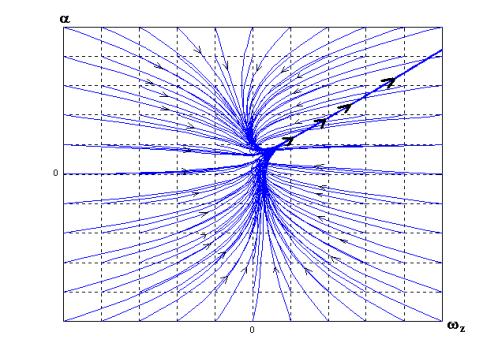
Контролируя
диапазон изменения значений вышеуказанных кинематических параметров движения
СВП, мы можем не допускать возникновения аварийных ситуаций, связанных с
потерей устойчивости. Фазовый портрет продольного движения СПК с
глубокопогруженными крыльями (ГПК) имеет одну неустойчивую точку равновесия,
следовательно, предельные циклы отсутствуют, а неуправляемое движение данного
типа МПО является неустойчивым. Фазовые траектории движения СПК, двигаясь по
направлению к точке балансировочного режима, достигая ее, как бы, попадают в «воронку»,
вызывая тем самым неограниченный рост значений кинематических параметров
движения. Данный факт свидетельствует о возможности возникновения аварийной
ситуации, связанной с собственной неустойчивостью СПК с ГПК по высоте движения
и крену, и обусловливает необходимость применения системы управления движением,
обеспечивающей автоматическое управление подъемной силой на крыльевом
комплексе.
Таким образом,
результаты, полученные в ходе анализа фазовых портретов СВП и СПК с ГПК,
позволяют сделать вывод о целесообразности прогнозирования устойчивости
движения данных МПО на основании анализа их фазовых портретов.
Литература:
1.
Стариченков
А.Л. Эллиптическая аппроксимация границы области устойчивости бокового движения
корабля на воздушной подушке // Навигация и управление движением. Сб. докладов I
научно-технической конференции молодых ученых, Санкт-Петербург, ЦНИИ
«Электроприбор», 6-7 апреля 1999г. С.161-167.
2.
Колызаев
Б.А., Косоруков А.И., Литвиненко В.А. Справочник по проектированию судов с ДПП.
Л.: Судостроение, 1980, 472 с.
3.
Лукомский
Ю.А., Стариченков А.Л. Общие закономерности и специфические особенности в
математических моделях морских подвижных объектов. // Гироскопия и навигация,
№2(17) 1997. – C. 44-52.