УДК 621.397
Dr. Ph.D, доцент Смагулова К.К., магистрант Омаров Е.К., магистрант
Рысмагамбетов Д.И.
Карагандинский государственный
технический университет,
Республика Казахстан
РАЗРАБОТКА СИСТЕМЫ
РАСПОЗНАВАНИЯ
ДЫМА В ВИДЕОПОТОКЕ
В статье представлен
комбинированный метод для быстрого распознавания дыма в
видеопоследовательностях с использованием методов предварительной обработки
кадров. Дым характеризуется различными свойствами, такими как цвет,
специфическим способом распространения, сглаживанием объектов, находящихся за
дымом и т. п. Достаточно сложно описать их, используя простейшие особенности
изображений. Обычно алгоритмы для распознавания дыма в видеопотоке используют
различные особенности распространения области дыма и цветовые характеристики
для описания задымления. Экспериментально было доказано, что применение данных
подходов недостаточно, поскольку при их использовании возможно продуцирование
большого количества ложных тревог. В данной работе будет показана
целесообразность использования такого свойства дыма при распознавании, как
прозрачность.
Ключевые
слова: распознавание дыма в
видеопотоке, методы распознавания образов, способы описания дыма.
Первым этапом в
обработке видеопотока будет балансировка цветовой схемы изображений,
составляющих видео поток. Для этого вычисляется среднее значение каждой R, G, B цветовой компоненты изображения с
целью получения реального уровня серого цвета. Это значение затем используется
для решкалирования каждой компоненты (рисунок 1).


а) б)
Рисунок 1 - Один кадр видеопотока до (а)
и после (б) балансировки цвета
На рисунке 2 представлен результат восстановления
цветовой компоненты дыма.


а) б)
Рисунок 2 - Исходный кадр видеопотока (а) и результат
восстановления
цветовой компоненты дыма (б)
Следующим этапом
обработки станет выделение на кадрах областей дыма, для чего используются
цветовые характеристики областей задымления. Известно, что дым имеет цвет от
светло - до темно-серого. Это свойство используется для выделения на
изображениях потенциальных областей дыма, в которых интенсивности цветовых
компонент находятся в следующем соотношении:

где T - порог, настраиваемый по обучающему набору видеофайлов.
Естественно,
использование цветовой характеристики для локализации областей задымления
недостаточно. Известно, что области задымления не находятся в неподвижном
состоянии, а постоянно перемещаются и меняют свои очертания. Поэтому следующим
этапом обнаружения областей задымления станет обнаружение на кадрах видеопотока
движущихся объектов.
Процедура обнаружения
движущихся областей осуществляется с помощью рекуррентного пересчета фонового
изображения в последовательности видеокадров. Движущиеся объекты на изображении
затем определяются с помощью вычитания каждой цветовой компоненты из фонового и
отсечения по порогу. Величина порога подбирается по обучающей
последовательности видеороликов. На рисунке 3 представлен результат
восстановления на изображении областей, соответствующих движущимся объектам.


а) б)
Рисунок 3 - Исходный
кадр видеопотока (а) и результат поиска на изображении движущихся объектов (б)
Области дыма затем
оцениваются на основании совмещения движущихся областей изображения и областей,
цветовые компоненты которых соответствуют серому цвету.
Характерная черта дыма -
сглаживание граней объектов, находящихся за областью задымления, что сильно
влияет на изменение энергии спектра кадра по сравнению с фоном.
Возьмем пиксель Pi,j. Применим к i-й строке фильтр Гаусса:
![]()
где M - математическое ожидание; σ - среднеквадратическое
отклонение. СКО задается вручную, математическим ожиданием является номер
пикселя в строке j.
Применяя разложение в
спектр Фурье к фильтрованному сигналу, можно определить его энергию, которая
равна сумме коэффициентов при разных частотах гармоник спектра. Взяв
соотношение энергий текущего кадра и фона, получим коэффициент отличия энергий
спектров. Если на сцене имеется область дыма, грани объектов сглаживаются
несильно и данный коэффициент принимает не слишком большие значения. Если
присутствует серый непрозрачный движущийся объект, грани объектов за ним перекрываются
и коэффициент отличия энергий принимает большие значения. Диапазон допустимых
значений подбирается по обучающей последовательности видеороликов (рисунок 4).
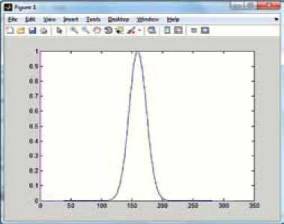
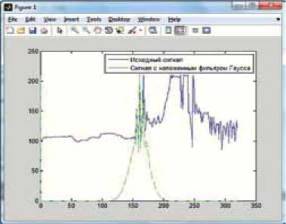
а) б)
Рисунок 4 - Фильтр
Гаусса (а) и его наложение на сигнал
строки изображения (б)
На рисунке 5 представлен
результат восстановления на изображении областей, удовлетворяющих требованиям
сглаживания граней.
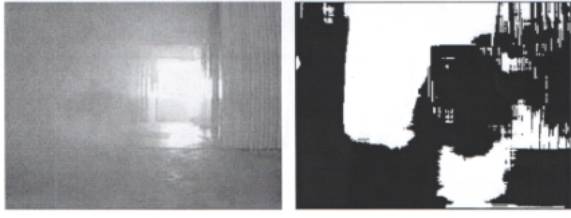
а) б)
Рисунок 5 – Исходный кадр видеопотока (а) и результат поиска на изображении
объектов, сглаживающих грани (б)
Другая характерная черта
областей задымления в том, что дым распространяется в основном вверх со вполне
определенной скоростью. Кроме того, особенность областей дыма - наличие
завихрений, мгновенной мерой оценки которых будет функция турбулентности:
где P(t) - периметр области дыма; A(t) - ее площадь.
Для определения P(t) на каждом кадре видеопотока проводится оценка контуров
областей задымления с помощью процедуры медианной фильтрации изображений,
составляющих видеопоток после локализации на них областей дыма (рисунок 6).

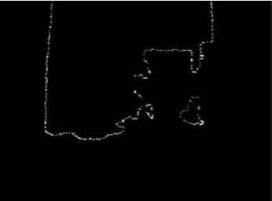
а) б)
Рисунок 6 - Движущаяся область, соответствующая дыму (а),
и ее оцененный контур (б)
Для видеосистем
детектирования дыма основное требование - как можно более раннее обнаружение
его появления. Для этого определяется производная функции турбулентности
характеризующая степень изменения турбулентности. Достаточно большие значения
производной данной функции будут соответствовать моменту возникновения и началу
распространения дымовой завесы.
![]() =,
=,
На рисунке 7 показана
функция кумулятивной суммы, а на рисунке 8 кадр видеофрагмента, соответствующий
превышению кумулятивной суммой заданного порога.
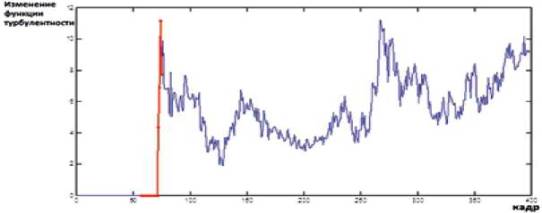
Рисунок 7 - Кумулятивная сумма
изменений функции турбулентности области задымления
|
|
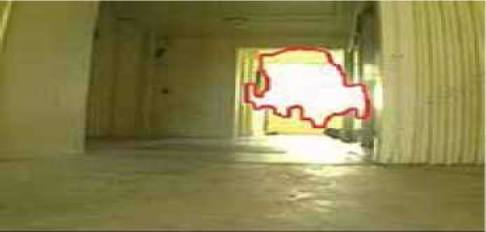
Рисунок 8 - Кадр видеофрагмента, соответствующий моменту
появления дыма в помещении
Момент возникновения
дыма определяется как превышение некоторого порога кумулятивной суммой значений
функции. Порог настраивается по обучающей последовательности видео файлов.
Информация об обнаружении дыма должна передаваться в модуль экспертизы.
Выводы:
основное отличие работы от подобных исследований - использование свойства
прозрачности дымовой завесы. Показано, что с помощью преобразования Фурье можно
достаточно простым способом найти сглаживания граней объектов, находящихся за
областью дыма.
Список использованной литературы
1.[Buchsbaum,
1980] Buchsbaum G. A spatial processor model for object
color perception // J. Franklin Inst. 1980.
V. 310. Iss. 1. P. 1-26.
2.[Catrakis,
Dimotakis, 1998] Catrakis H. J., Dimotakis
P.E. Shape Complexity in Turbulence // J.
3.Physical Review Letters. 1998. V. 80. N. 5. P. 968-971.
4.[Celik et
al., 2007] Celik T., Ozkaramanly H., Demirel H. Fire and Smoke Detection Without Sensors:
Image Processing Approach // Proc.
15th European Signal Processing Conf. EUSIPCO. 2007. P. 1794-1798.
5.[Chunyu et
al., 2010] Chunyu Y., Jun F., Jinjun W., Yongming Z. Video Fire Smoke Detection Using Motion
and Color Features // J. Fire Technology.
2010. V. 46. N. 3. P. 651-663.
6.[Kopilovic
et al., 2000] Kopilovic I., Vagvolgyi B., Sziranyi T. Application of
panoramic annular lens for motion analysis tasks: surveillance and smoke
detection // Proc. 15th
Intern. Conf. Pattern Recognition. 2000. V. 4. P. 714-717.