Сучасні інформаційні
технології/Комп'ютерна інженерія
Мясіщев О.А., Швець В.В.
Хмельницький національний університет,
Україна
Режими польоту контролерів польоту APM 2.6 і Pixhawk БПЛА
Розробка безпілотних літальних апаратів (БПЛА) - одне з найбільш перспективних напрямків розвитку сучасної авіації. Зараз вони використовуються для дослідження місцевості, для проведення рятувальних операцій МНС, в роботі пожежних служб, військової розвідки, доставки вантажів. В даний час розроблено велику кількість контролерів польоту з програмним забезпеченням. Це контролери Multiwii, ArduCopter (APM 2.6, APM 2.8), Pixhawk, контролери DJI (Naza-M Lite, DJI Naza-M V2, DJI Wookong), MicroKopter, Zero UAV X4 / X6, AutoQuad, KK., XAircraft та ін.
В залежно від використання БПЛА, необхідно правильно вибрати польотний контролер спільно з програмним забезпеченням для його функціонування. В статті розглядаються контролери ArduPilot Mega APM 2.6 та Pixhawk, які являються досить потужними контролерами польоту.
ArduPilot Mega APM 2.6 (рис.1) є повноцінним рішенням БПЛА, який заснований на швидко розвиваючій та вдосконаленій архітектурі ArduPilot Mega або «APM», відкритому проекті з 3DR робототехніки. 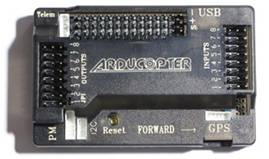
Рис.1 - контролер APM 2.6
Контролер крім радіокерованого дистанційного пілотування має масу різних польотних режимів, в тому числі і автоматичні місії, такі як політ по карті або заданому маршруту за встановленими точкам. Функція передачі телеметрії в обидві сторони дозволить управляти апаратом протягом усього польоту через смартфон, планшет або комп'ютер. А також надає можливість вести запис і переглядати технічні показники, такі як показники датчиків, GPS і інше. ArduPilot Mega APM 2.6 має такий набір датчиків: акселерометр, гіроскоп, барометр, магнітометр на основі показників яких керується алгоритм польоту. Контролер Pixhawk (рис.2) це нова просунута система автопілота побудована на базі проекту з відкритим кодом PX4 і вироблена компанією 3D Robotics. Pixhawk являється новішою розробкою ніж APM 2.6.
Рис.2 -
контролер Pixhawk
Принципова відмінність від ArduPilot Mega APM 2.6, що новий контролер має високопродуктивний 32-розрядний процесор, який має значний запас пам'яті. Це робить його більш перспективним для розвитку наступних поколінь прошивок. В даний час істотною відмінністю є те, що програмне забезпечення Pixhawk, на відміну від APM 2.6 дозволяє випробувати роботу фільтра Кальмана для більш точної обробки показань сенсорів. Для користувача це може означати що такий контролер зможе працювати більш стійко в умовах вібрацій. Сенсори від відомої компанії ST Microelectronics і операційна система реального часу NuttX забезпечує неймовірну продуктивність, гнучкість і надійність при управлінні будь-яким автономним пристроєм. Також перевагами Pixhawk над APM 2.6 є те що системи Pixhawk включають в себе багатопоточність в таких системах програмування, як Unix \ Linux, а так само оновлені режими автопілотування, таких як Lua Scripting, а спеціалізований драйвер PX4 дає більш тривалий час для польоту. Pixhawk дозволяє користувачам APM і PX4 плавно перейти до цієї системи, оскільки вона є їх логічним продовженням, а за рахунок хорошої документації та продуманої системи управління знижується бар'єр для входу нових користувачів. Основний модуль Pixhawk може бути розширений додатковими опціями, такими як цифровий датчик повітряної швидкості, зовнішнього компаса та ін. Вся периферія автоматично визначається і конфігурується. Основним недоліком Pixhawk являється його ціна. ArduPilot Mega APM 2.6 являється більш дешевшою моделю. Існує значна кількість польотних режимів, яка дозволяє БПЛА виконувати ряд корисних функцій. Вищи вказані контролери дуже багаті різноманітними режимами польоту, які кожен пілот може використовувати для своїх цілей. Без використання модуля GPS можна скористатися лише декількома режимами польоту:
- Stabilize - основний режим, в якому рекомендується злітати і здійснювати посадку.
- Acro - режим, при якому можна досягти більш різкого і швидкого польоту.
- AltHold - режим утримання висоти.
- PosHold - це новий режим для AC3.2. Він схожий на Loiter в тому, що коптер підтримує постійне місце розташування, напрямок і висоту, але, як правило, більш популярний, тому що пілот апаратурою прямо контролює кут нахилу коптера, забезпечуючи більш «природне» відчуття.
- Auto Tune – автопідбір значень PID.
- Land - режим автоматичної посадки в поточному положенні.
- Simple - режим, який дозволяє «забути» про орієнтацію коптера щодо пілота.
При наявності модуля GPS можна скористатися додатковими режимами:
- Loiter - режим утримання точки (по координаті і висоті).
- RTL (Return To Launch) - повернутися додому, в точку зльоту.
- Brake - режим зупиняє політ коптера як можна швидше, використовуючи режим Loiter.
- Auto - політ по точкам місії.
- Position - утримання позиції (тільки по координаті).
- Drift - польотний режим, в якому "заносить філейну частину коптера". Задаючи поворот стиком YAW, легкий нахил по ролу закладається сам, як ніби ми летимо на літаку і повертаємо елеронами.
- Sport - даний режим також відомий, як "контрольована стабілізація" сумісно з утриманням висоти. Він був розроблений, щоб бути корисним для польотів FPV і зйомок або польотах на майданчиках, тому що ви можете встановити апарат під певним кутом нахилу і він буде утримувати цей кут. Коптер не буде нахилятися більше 45 градусів.
- Circle - політ по окружності носом до центру.
- Throw - це небезпечний режим польоту дозволяє пілоту кинути коптер у повітря (або скинути коптер), щоб запустити двигуни.
- FailSafe - режим рятування, який відправить коптер летіти додому.
- Guided - політ по команді, даної з наземної станції .
- FollowMe - політ за ведучим.
- Super Simple – даний режим вважають добавкою до Simple, але тут потрібно використовувати GPS. Super Simple це режим, який до 10 м радіуса не вносить поправок в управління, а на віддалення більше 10 м працює на «притягувані додому», тому якщо стик тангажа тягнуть на себе, то коптер летить до місця точки. Більше 10 метрів також не важливо, як коптер орієнтований, то працює. як Simple. Зручно, якщо «зарулилися».
Перед тим як спробувати ці режими - нам спочатку їх необхідно налаштувати. Налаштування здійснюється через програму Mission Planner від команди DIY drones.
Отже для налаштування режимів польоту в загальному необхідно зробити
наступні дії:
1) На наземній станції слід встановити програмне забезпечення Mission Planner.
2) Увімкнути радіопередатчик.
3) Підключити контролер до Mission Planner.
4) Зайти в розділ Initial Setup -> Flight Mode.
5) 5-й канал даного передатчика відповідає за режими польоту, зелена полоса в програмному забезпеченні вказує поточний режим, при переключені апаратури (радіопередатчика) зелена полоса буде переміщатися.
6) Використовуючи випадаючий список в кожному положенні, слід вибрати режим польоту. Принаймні один з режимів повинен бути режим стабілізації (Stabilize).
7) За бажанням можна поставити галочку Simple напроти кожного із режимів, що дозволить здійснювати управління наче передня частина апарата завжди направлена від Вас.
8) Коли режими встановленні, слід зберегти налаштування, натиснувши на
кнопку Save Modes.
На рис. 3 наведено вікно
налаштування в програмі Mission Planner.
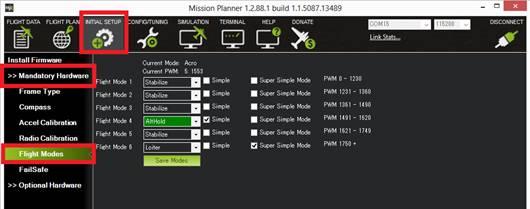
Рис.3 - вікно налаштування в програмі Mission Planner
Висновки
1. На даний момент
контролер польоту ArduPilot Mega APM 2.6 цілком задовольняє всі необхідні умови для
повноцінного функціонування БПЛА. Однак порівняння контролерів Pixhawk
та APM 2.6 показало, що перший являється новішою розробкою і є більш
ефективним.
2. APM 2.6 та Pixhawk мають
велику кількість режимів польоту, а при використанні модуля GPS можна ще
використовувати додаткові режими.
3. Для налаштування БПЛА на базі контролера
APM 2.6 або Pixhawk слід використовувати програмне
забезпечення Mission Planner, можливості якого перевершують
багато платні аналогічні програми. Також за допомогою Mission Planner
показано як слід налаштовувати режими польоту для коптера.
Література
1. Интеллектуальные робототехнические
и мехатронные системы: учеб. пособие / под ред. В.И.Сырямкина. - Томск, 2017. - 256 с. (Серия:
"Интеллектуальные технические системы" (подсерия:
"Когнитивная робототехника")).
2.
RC Transmitter Flight Mode Configuration. [Electronic resource]. - Mode of
access:
http://ardupilot.org/copter/docs/common-rc-transmitter-flight-mode-configuration.html,
2016.
3. Построение БПЛА на базе полетного
контроллера APM 2.6. [Electronic resource]. - Mode of access:
https://sites.google.com/site/webstm32/bpla-apm-2-6,
2016.
4.
Полетные режимы.
[Electronic resource]. - Mode of access:
http://apmcopter.ru/apm/apm-setup/poletnye-rezhimy.html,
2014.
5.
APM 2.6 ArduPilot контроллер полета. [Electronic resource]. - Mode of access:
https://flymod.net/item/apm_26_ardupilot_flight_controller,
2017.
6.
Pixhawk. [Electronic resource]. - Mode of
access:
http://multicopterwiki.ru/index.php/Pixhawk,
2017.
7.
Pixhawk overview. [Electronic resource]. - Mode of
access:
http://ardupilot.org/copter/docs/common-pixhawk-overview.html#common-pixhawk-overview,
2016.
8.
Полетный контроллер Pixhawk 3DR. [Electronic resource]. - Mode of access: