Д.т.н.
Хасцаев Б.Д.
Северо-Кавказский
горно-металлургический институт, Россия
ПРОЕКТИРОВАНИЕ АНАЛОГОВЫХ
ФАЗОАМПЛИТУДНЫХ ПРЕОБРАЗОВАТЕЛЕЙ ДЛЯ АСУ ТП С ПОВЫШАЮЩИМ ИМПУЛЬСНЫМ РЕГУЛЯТОРОМ
НАПРЯЖЕНИЯ
Не
только в локальных измерительных приборах и в системах сбора данных широко
используемы аналоговые фазоамплитудные преобразователи (АФАП), но и в
автоматизированных системах управления технологическими процессами (АСУ ТП).
Как известно АФАП обеспечивают преобразование угла сдвига фаз между двумя
синусоидальными сигналами одной частоты в амплитуду постоянного напряжения [1,
2]. Применение АФАП в системах управления определяется тем, что угол сдвига фаз
между двумя синусоидальными сигналами одной частоты часто оказывается
высокоинформативным параметром как о состоянии, так и о свойстве (о свойствах) управляемого (контролируемого) объекта
[3, 4]. В АСУ ТП эти устройства обеспечивают первичной информацией о ходе
технологических процессов. АФАП применимы не только в АСУ ТП различных
производств, но и для повышения информативности, а значит и для повышения
эффективности научных исследований в области физики, медицины, биологии, химии
и т.д. [4].
Однако
существующие АФАП не всегда соответствуют современным требованиям, поэтому
разработка новых принципов построения АФАП, обеспечивающих создание АФАП,
превосходящих аналоги, является актуальной задачей, которой и посвящена
настоящая работа.
Несложно
предположить, что проектирование устройств данного класса возможно на базе
разных элементов электронной техники, но их проектирование наиболее эффективно
на основе операционных усилителей. Проектирование АФАП на этой элементной базе
- одна из особенностей предлагаемой работы. Другая ее особенность определяется
использованием в качестве выходного каскада АФАП повышающего импульсного
регулятора постоянного напряжения (ПИРН), как для обеспечения преобразования
угла сдвига фаз в амплитуду постоянного напряжения и широкого спектра значений
этого напряжения, так и обеспечения высоких
нагрузочных способностей АФАП. Рассмотрим выделенные особенности и, собственно,
этапы проектирования.
Проектирование
АФАП целесообразнее всего производить на основе алгоритма, приведенного на
рис.1. Не останавливаясь на подробном рассмотрении этого алгоритма и реализации
всех его шагов, отметим лишь отдельные, наиболее существенные стороны
проектирования АФАП с требуемыми свойствами и возможностями. Понятно, что чем
шире диапазон изменения выходного напряжения АФАП, тем более востребованными
будут разработанные АФАП. К примеру, диапазон изменения напряжения на выходе
АФАП может быть равным - от 0 до 5В с числом уровней амплитуды 100.

![]()
![]()
Рис. 1. Алгоритм
проектирования АФАП
Угол
сдвига фаз между сигналами одной частоты легче всего определять между
сигналами, имеющими как можно более простую форму. Такую форму имеют
прямоугольные импульсы. В связи с этим вначале синусоидальные сигналы должны
быть преобразованы в прямоугольные импульсы.
Принципы
проектирования АФАП, включая и вопросы преобразования угла сдвига фаз между
сигналами в напряжение, в работе рассматриваются на примере схемы,
представленной на рис. 2. Как видно из рисунка, для преобразования
синусоидальных сигналов в прямоугольные импульсы применены инвертирующие усилители
на основе операционных усилителей DA1 и DA2
с глубокой обратной связи (участок 1 на рис. 2), элементы обратной связи
которых выбираются таким образом, чтобы усиление сигнала достигало величины -
700-900. Понятно, что такое усиление достигается соотношением сопротивлений R2/R1 и
R4/R3. На выходах DA1
и DA2 формируются прямоугольные импульсы, амплитуда которых
соответствует напряжению источника питания DA1 и DA2.
Для
формирования прямоугольных импульсов, длительность которых пропорциональна
фазовому сдвигу между прямоугольными импульсами с выходов DA1
и DA2, используется дифференциальный усилитель, обозначенный как
DA3 на рис. 2 (участок 2). В усилителе DA3
коэффициенты усиления по обоим входам должны быть равными 1, что обеспечивается
выбором номиналов резисторов R5…R8.
Для получения импульсов одной полярности в схеме использован диод VD1,
включенный в конце участка 2. Длительность этих импульсов t
пропорциональна углу сдвига фаз Δφ сигналов на входе
АФАП, т.е. t=f(Δφ).
Из
разделения схемы АФАП условно на два блока видно, что формирование импульсов с
длительностью t=f(Δφ) происходит в первом
блоке АФАП, а во втором блоке необходимо и важно использование этих импульсов в
качестве сигналов управления и для реализации широтно-импульсной модуляции (ШИМ).
Этим и определилась основная идея работы – формирование в первом блоке схемы
АФАП управляющих сигналов и применение их во втором блоке (естественно,
используя ШИМ для управления амплитудой сигналов, подаваемых на
объект управления). В качестве
второго блока предусмотрено включение в схему АФАП, как было отмечено выше,
ПИРН (участок 3 рис. 2) [5]. Подачей на управляющий элемент ПИРН выходных
сигналов VD1 возможно формирование сигналов, пропорциональных углу сдвига фаз сигналов,
подаваемых на входы АФАП, и возможна реализация функции: U=f(Δφ,UDC1), где UDC1 – напряжения источников
питания отмеченного регулятора.
Так
как чаще всего в системах управления важно формирование сигналов управления с
унифицированными параметрами, ранее было отмечено, к примеру, c
уровнем напряжения от 0 до 5В, то выбор напряжения питания ПИРН определяется
диапазоном изменения управляющих сигналов.
Таким
образом, одна из функций используемого ПИРН - преобразование длительности
импульсных сигналов управления в унифицированные сигналы постоянного
напряжения. Поэтому в регуляторе, иллюстрируемом на участке 3 рис. 2,
напряжение источника питания, обозначенного на схеме как DC,
должно быть выбрано из условия обеспечения на выходе изменения амплитуды
постоянного напряжения в необходимом диапазоне. К примеру, при диапазоне от 0
до 5В напряжение на выходе АФАП равно 0, если угол сдвига фаз равен 1800
и 5В, если угол сдвига фаз равен 00.
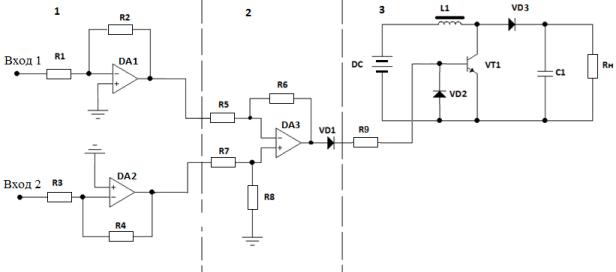
Рис.2. Схема АФАП с
повышающим импульсным регулятором постоянного напряжения
Возможно применение на
выходах ПИРН фильтров, к примеру, типа С – фильтр, что показано на рис. 2 [5].
Краткий анализ структуры
и алгоритма работы регулятора показывает, что он состоит из: источника питания DC; регулирующего ключа, реализованного на основе
транзистора VT1 (ключ выполняет функцию управляющего элемента ПИРН); катушки индуктивности L1;
фильтра, реализованного на базе конденсатора C1; нагрузки Rн;
диодов VD2 и VD3; резистора R9. При замыкании регулирующего ключа путем
подачи сигнала на базу транзистора VT1, ток от источника
питания DC, протекая
через катушку индуктивности L1, запасает энергию в катушке. Энергия в
нагрузку поступает от конденсатора C1 фильтра, который на этом
этапе разряжается через нагрузку Rн. При размыкании регулирующего ключа из-за
прекращения подачи сигнала на базу VT1, ток L1
переключается через VD3 на нагрузку Rн, а к ключу VT1 прикладывается
высокое напряжение. Энергия, потребляемая на этом этапе от источника
постоянного напряжения DC, восполняет потери энергии C1 на этапе его
разряда. На этапе включенного состояния VT1 к L1
прикладывается постоянное высокое
напряжение, поэтому и к концу этапа
ток L1 возрастает до максимума. На этапе, когда VT1 выключен, ток
L1 уменьшается до минимального значения.
Особенности алгоритма
работы АФАП определяются: возможностью приема от аналоговых датчиков сигналов
синусоидальной формы одинаковой частоты, но отличающихся друг от друга по фазе;
преобразованием принятых сигналов в
импульсы прямоугольной формы; формирование на основе преобразованных импульсов
импульса с длительностью, пропорциональной величине угла сдвига фаз;
применением этого импульса для формирования на выходе ПИРН напряжения с
амплитудой, пропорциональной углу сдвига фаз между двумя сигналами на входе
АФАП. Последний шаг алгоритма предусматривает формирование унифицированных
сигналов постоянного напряжения. В целом, алгоритм предусматривает формирование
спектра различных уровней напряжения на выходе АФАП, тем самым повышает
актуальность АФАП в АСУ ТП.
Разработанный АФАП по
сравнению с аналогами отличаются высокой точностью преобразования, малыми
габаритными размерами, простотой в эксплуатации и экономичностью, а сама работа
представляет интерес студентам и аспирантам, занимающимся разработкой систем
управления, используемых как в производстве, так и в научных исследованиях.
Литература
1.Раннев
Г. Г. Методы и средства измерений: Учебник для вузов.– 2-е изд., стереотип.–М.:Издательский
центр «Академия», 2004.–336с.
2. Ратхор Т.С. Цифровые измерения. АЦП/ЦАП.
Москва, Техносфера, 2006.–92с.
3.Хасцаев
Б.Д., Мустафаев Г.А. Повышение точности и достоверности контроля в ТП
производства изделий микроэлектроники // Известия КБГУ. Вып.1. 2012.
4.Хасцаев Б.Д., Хасцаев М.Б. Применение
информационных свойств электрического импеданса биообъектов в медицине и
биологии. Изд-во: LAMBERT Academia Publishing, Германия, 2013. 98с.
5.Розанов Ю.К., Рябчицкий М.В., Кваснюк
А.А. Силовая электроника: учебник для вузов.
2-е изд., стереотипное-М.: Издательский дом МЭИ. 2009.-612 с.: ил.