Уалиев Заир Гахипович,
д.т.н., профессор.
Оган Нурбек. Магистрант 2
курса.
Казахский Национальный
Педагогический Университет им. Абая,
Г.Алматы
АЛГОРИТМ КИНЕМАТИЧЕСКОГО АНАЛИЗА ПЕРЕДАТОЧНЫХ
МЕХАНИЗМОВ С НЕЛИНЕЙНОЙ ФУНКЦИЕЙ ПОЛОЖЕНИЯ
Основными
передаточными механизмами машинных агрегатов являются рычажные,
кулачково-рычажные с плоскими, пазовыми или пространственными кулачками. По
расчету и исследованию кулачковых механизмов различных машин выполнено большое
количество работ и имеется обширная литература, в которой приводятся алгоритмы
их кинематического и динамического расчета, в том числе с использованием ЭВМ. В
дальнейшем при построении динамических моделей механизмов переменной структуры
всегда даются ссылки на функции положения и передаточные отношения. В связи с
этим в этом разделе приводятся выражения функции положения типовых передаточных
механизмов и алгоритмы кинематического анализа.
Заданным
параметром для кинематического анализа кулачково-рычажных механизмов является
значение радиуса-вектора профиля кулачка ![]() , зависящего от полярного угла
, зависящего от полярного угла ![]() /1/. При этом
необходимо получить аналитические выражения для функции положения
/1/. При этом
необходимо получить аналитические выражения для функции положения ![]()
![]() -
-![]() угол поворота кулачка. Для определения передаточных функций
первого и второго порядка достаточно функцию положения последовательно
дифференцировать по углу поворота кулачка. Во избежание громоздких выкладок и
неудобных расчетных зависимостей определение функций положения, скорости и
ускорения ведомого звена кулачково-коромыслового механизма производится методом
обращенного движения.
угол поворота кулачка. Для определения передаточных функций
первого и второго порядка достаточно функцию положения последовательно
дифференцировать по углу поворота кулачка. Во избежание громоздких выкладок и
неудобных расчетных зависимостей определение функций положения, скорости и
ускорения ведомого звена кулачково-коромыслового механизма производится методом
обращенного движения.
Ниже будут
рассмотрены вопросы алгоритмизации кинематики типовых схем: плоских и
пространственных кулачково-коромысловых механизмов
и четырехзвенника.
Задачу определения функций положения и передаточных функций
кулачково-коромыслового механизма при заданных
длин звеньев и радиуса профиля кулачка ![]() . Рассмотрим два положения коромысла (рис.1) в обращенном
движении, соответствующих начальному положению
. Рассмотрим два положения коромысла (рис.1) в обращенном
движении, соответствующих начальному положению
![]() и текущему положению.
и текущему положению.
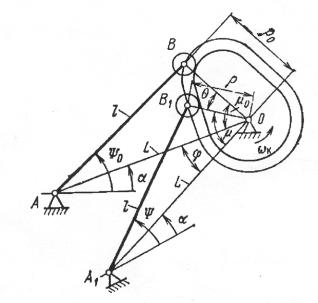
Рисунок 1. Схема плоского кулачково-коромыслового механизма
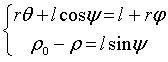
Для функции
положения плоского кулачково-коромыслового механизма имеем следующие
соотношения:
 (1)
(1)
 . (2)
. (2)
Зависимость
между углом поворота кулачка ![]() и полярным углом
и полярным углом ![]() можно записать в виде
можно записать в виде
![]() ,
,
где ![]() - угол,
соответствующий начальному положению, вычисляется по формуле (2).
- угол,
соответствующий начальному положению, вычисляется по формуле (2).
При заданных
угловой скорости ![]() и ускорении
и ускорении ![]() кулачка, угловая
скорость
кулачка, угловая
скорость ![]() и ускорение
и ускорение ![]() коромысла
определяются из следующих выражений:
коромысла
определяются из следующих выражений:
 ;
;
 . (3)
. (3)
Аналоги
угловой скорости коромысла определяются дифференцированием выражения (1) по
углу ![]() :
:
 .
(4)
.
(4)
Аналогично
из выражения (2) найдем:
 . (5)
. (5)
Из выражения
(3) следует:
 (6)
(6)
Обозначив
![]() ;
;
![]()
и разделив
соотношение (4) на (6) с учетом (5), получим следующее выражение для аналога
угловой скорости коромысла:
 (7)
(7)
Продифференцировав
(7) по ![]() , разделив на (6), определим аналог ускорения коромысла:
, разделив на (6), определим аналог ускорения коромысла:
 ,
,
где
 ;
;
 .
.
Рассмотрим
задачи кинематического анализа пространственного кулачково-рычажного механизма.
Развернем цилиндрический кулачок по среднему радиусу r контакта
ролика и паза, а затем дадим развертке и коромыслу AB обращенное движение со скоростью ![]() , противоположной окружности скорости цилиндрического
кулачка. Из рис. 2, учитывая, что угол
, противоположной окружности скорости цилиндрического
кулачка. Из рис. 2, учитывая, что угол ![]() отчитывается от
вертикали, имеем
отчитывается от
вертикали, имеем
 ; (8)
; (8)
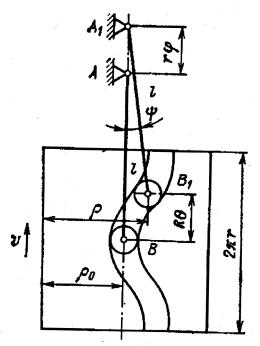
Рисунок 2.
Схема пространственного кулачкового механизма
Отсюда можно получить функцию положения ![]() в параметрическом
виде:
в параметрическом
виде:
 ;
;
 .
.
Тогда
 ; (8)
; (8)
 . (9)
. (9)
Разделив
выражение (8) на (9), для аналога скорости коромысла AB имеем
 (10)
(10)
Аналог
ускорения коромысла AB определим,
дифференцируя (10) по ![]() и разделив на
выражение (9), после чего имеем
и разделив на
выражение (9), после чего имеем
 .
.
Кинематическое
исследование плоского четырехзвенника (рис. 3) будем вести методом замкнутых
векторных контуров.
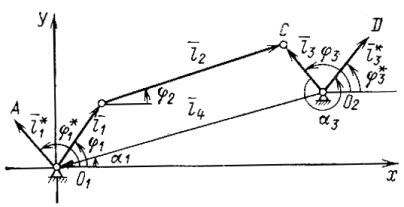
Рисунок 3.
Схема четырехзвенника
Векторное
уравнение замкнутости контура будет
![]() ,
,
или в
проекциях на оси координат
 (11)
(11)
Обозначив
![]()
![]()
![]()
![]()
получим
систему уравнений
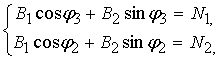
из которой
определим
Очевидно,
что после дифференцирования (12) по ![]() и некоторых
преобразований получим для аналогов скоростей следующие выражения:
и некоторых
преобразований получим для аналогов скоростей следующие выражения:
Дифференцируя
последние выражения аналогов скоростей по![]() , получим выражения для аналогов ускорений:
, получим выражения для аналогов ускорений:

Рассмотрим
передачу движения от звеньев четырехзвенника к ползуну. Исследуем движение
ползуна (рис. 4) методом замкнутых контуров:
![]() .
.
или в проекциях на оси
координат
Отсюда получим выражение
для положения
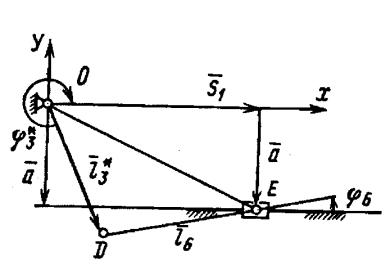
Рисунок 3.
Схема кривошипно-ползунного механизма
Тогда
положение ползуна определяется из соотношения
Дифференцируя
уравнения в проекциях по ![]() , получим выражения для аналогов скорости и ускорения
, получим выражения для аналогов скорости и ускорения
Из этой
системы получим выражения для аналогов угловой и линейной скорости ползуна в
виде
 и
и 
Повторным
дифференцированием выше приведенной системы уравнений и некоторым их преобразованием
получим аналог линейного ускорения ползуна
Выше
приведенные выражения и последовательности решения уравнении связи для блочных
систем или групп шарнирных и кулачково-рычажных механизмов определяют алгоритм
вычисления плоских механизмов 2 класса с нелинейными функциями положения.