Технические науки/12.Автоматизированные
системы управления на производстве.
К.т.н.
Айкеева А.А.1, к.ф.-м.н. Маханов К.М.1, магистрант Танскожанова
А.Р.1, студент Аюбекова А.Е.1, студент Каппар С.С.1,
студент Изимов С.А.1
1 Карагандинский
Государственный Университет им. академика Е.А. Букетова, Казахстан;
Разработка схемы
переключения полярности электромагнитов в направляющих устройствах для обеспечения движения скипа
Данная работа направлена на разработку системы
управления электромагнитной подъемной установкой. Для того, чтобы разработать
такую систему управления необходимо создать автоматическую систему переключения
полюсов.
Для проведения предварительных экспериментов разработана экспериментальная
модель левитационной системы. Выбрана платформа
Arduino UNO на базе микроконтроллера Atmega328. В работе, также, представлено описание драйвера L293D
и рассмотрен принцип работы драйвера входящий в состав микросхемы.
Ключевые
слова: электромагнитная подъемная установка,
микроконтроллер, транзистор серии КТ805, драйвер микросхемы L293D
В настоящее время нет достаточно обобщенных теоретических
и экспериментальных исследований, которые могли бы использоваться при расчете и
проектировании электромагнитной подъемной установки, основанной на магнитной
левитации. Сущность предлагаемой технологии заключается в применении для
подъема и движения скипа силы электромагнитного поля (магнитная левитация) для
осуществления бесканатного подъема.
Для
обеспечения движения скипа как в горизонтальном, так и вертикальном направлении
необходимо упорядоченное переключение полюсов электромагнитов в направляющих
устройствах. Для обеспечения бесперебойной работы электромагнитной подъемной
установки необходимо переключение полярностей сотен электромагнитов. Это
обусловливает необходимость разработки автоматической системы управления.
Во время движения скип находится под воздействием
разнообразных по своему происхождению и характеру сил. Указанные силы можно
подразделить на электродинамические и механические.
Результаты экспериментальных и теоретических исследований
для диапазона скоростей движения, присущих установкам с магнитным подвесом
показали, что сила аэродинамического сопротивления воздушной среды является
доминирующей составляющей результирующей силы сопротивления движению скипа.
Силы, действующие на скип со стороны воздушной среды, при
самой общей постановке задачи определяются главным вектором аэродинамической
силы и ее главным моментом относительно центра масс.
Для проведения предварительных экспериментов разработана
экспериментальная модель левитационной системы.
Разработанная экспериментальная модель состоит из одного
направляющего устройства и движущейся на ней тележки. Схема экспериментальной модели соответствует
рисунку 1.
Рисунок 1 - Схема
экспериментальной модели
Направляющее устройство состоит из направляющего
проводника и электромагнитов. По всей длине направляющего проводника
установлены электромагниты с чередованием южного и северного полюсов. В
направляющем проводнике имеются пазы для шарниров. На тележке установлены два
электромагнита с чередованием полюсов и шарниры.
Напряжение питания на электромагниты подаются таким
образом, что когда разноименные полюса электромагнитов на проводнике и тележке
притягиваются, одноименные полюса электромагнитов отталкиваются. Благодаря
этому тележка приводится в движение. Скорость движения тележки регулируется
электромагнитной силой электромагнитов, зависящей от питающего напряжения.
Был проведен
ряд экспериментов в результате которых получили движение модели скипа (тележки)
в горизонтальном направление в соответствии с рисунком 2.


а) б)


в) г)
а)
движение тележки
в начальном положении, б) движение тележки в середине, в) в конце г)
расположенные внизу тележки электромагниты
Рисунок
2 - Движение тележки в горизонтальном направлении
На нижней
платформе стенда установлены электромагниты с чередующейся полярностью. Так же в
нижней части модели скипа (тележка) расположены два электромагнита с
чередующейся полярностью. Электромагниты на тележке и на платформе расположены
таким образом, что при переключении полярности электромагнитов на платформе
тележка приводится в движение. Так же были проведены
эксперименты с электромагнитами других видов: с ферритовыми сердечниками и
стальными сердечниками.
Для решения
задачи автоматического переключения полярности используемых электромагнитов
была разработана и собрана схема, состоящая из реле, транзисторного ключа
стягивающих резисторов.
В качестве
управляющей части была выбрана платформа Arduino Uno на базе микроконтроллера
Atmega328. Выбор
обусловлен прежде всего возможностями данной платы, доступностью буферных
элементов (к примеру L293D), простотой и доступностью среды программирования и
т.д. Однако главным аргументов в пользу данного выбора является наличие встроенного
транслятора, компилятора кода. Встроенный программатор избавляет от
необходимости
-
изготовления монтажной платы под используемый микроконтроллер;
- покупки
программатора.
Следовательно,
способствует экономии средств и времени. Кроме того, сама процедура монтажа и
изготовления отдельной платы микроконтроллера сопряжена с дополнительными
сложностями — «ручной» разводкой схемы, распечаткой, протравкой и наконец,
рутинной компоновкой всех необходимых деталей.
Была разработана схема
переключения полярностей электромагнитов направляющих устройств в соответствии
с рисунком 3.
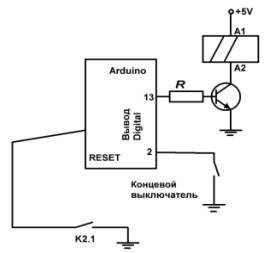
Рисунок
3–Предварительная схема переключения полярностей электромагнитов
В качестве
исполнительного элемента (переключателя) мы использовали одноканальный модуль
реле SRD-5VDC-SL-C, так как он позволяет с легкостью управлять нагрузкой с
высоким током или напряжением.
У данной схемы есть как
положительные стороны, так и недостатки. К положительным можно отнести
практически 100% замыкание контактов реле. Возможность коммутации значительно
высоких токов и т.д. Однако, как уже было отмечено есть и недостатки. И в
первую очередь это «громоздкость» и значительно высокая стоимость схемы за счет
использования большого количества реле.
Была предпринята попытка
использования мостовой схемы из четырех транзисторов. На каждый вывод катушки
мы подключили по два транзистора различной структуры p-n-p и n-p-n. Идея была
простая, если открывать одновременно два противоположных транзистора с
различной проводимостью базы, т.е. осуществлять управление с двух пинов
контроллера, то можно чередуя пары транзисторов менять полярность катушки.
Длительность и время включения определяется программно.
Необходимо было
разработать такую схему, в которой количество используемых деталей было бы
минимальным, а управляющих выводов микроконтроллера хватило на 10-12
электромагнитных катушек.
Поэтому целесообразно
было включить в схемумикросхему, которая позволила бы оставить большее
количество пинов и предусмотреть защиту отскачков напряжения и тока в момент
включения электромагнитов.
Обзор литературных
данных выявил наличие микросхем, схема и логика работы которых позволяли их
использование для реализации поставленной задачи. Одной из таких микросхем
является L293D. Выбор данной серий обусловлен достаточно высокими параметрами
управляющего тока. Согласно технических характеристик данной серии в пиковых
ситуациях, возможно коммутирование токов до 1,6 ампер. Данная величина вполне
удовлетворяла нашим потребностям. К тому же одна микросхема по количеству
выводов и порядку их подключения позволяла одновременное коммутирование двух
катушек. Одним из достоинств данной серии микросхемы L293D является наличие
встроенных диодов. Диоды включены в обратной полярности, чем обеспечивается
защита схемы.
Таким образом, за основу
разрабатываемой нами схемы была взята схема соединения аналогично схеме
соединения трехфазного двигателя в соответствии с рисунком 4.
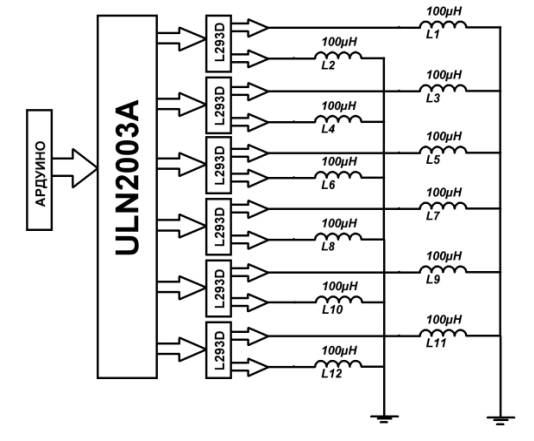
Рисунок
4 - Схема включения с использованием
ключа ULN2803A
Была
произведена имитация переключения полярностей электромагнитных катушек.
Необходимо точно управлять временем включения и выключения для достижения
максимальной эффективности управления в соответствии с рисунком 5.
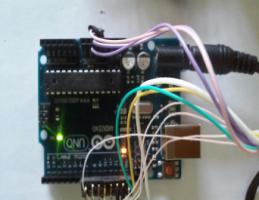


Рисунок 5-Модель управления переключение полярностей
электромагнитов
Таким образом, на основе
автоматизированного системного анализа разработаны имитационные модели
конструкции электромагнитной подъемной установки, комплексно учитывающие
конструктивно-технологические факторы.
Для обеспечения бесперебойной работы
электромагнитной подъемной установки. Изысканы и разработаны схемы переключения
полярности электромагнитов в направляющих устройствах с оптимальным
количеством, используемых деталей. Реализовано управление на базе платформы
ArduinoUNO с микроконтроллером Atmega328, встроенным транслятором, компилятором
кода. В управлении схемой включения использована широтно - импульсная модуляция
сигнала. Схема имеет встроенную защиту от перегрева и перегрузок.
В ходе исследования были разработаны несколько
экспериментальных стендов левитационной системы, состоящая из одного
направляющего устройства и движущейся на ней тележки и из трех направляющих
устройства, расположенных под 120 градусов относительно друг друга. Внутри на
скипе установлены неодимовые магниты, расположенные также под 120 градусов
относительно друг друга с чередующейся полярностью. Направляющее устройство
состоит из направляющего проводника и электромагнитов. По всей длине
направляющего проводника установлены электромагниты с чередованием южного и
северного полюсов. Осуществлен выбор параметров электромагнитов.
Данная статья написана
на основании результатов исследований, выполняемых в рамках грантового
финансирования МОН РК по подприоритету «Технологии разработки полезных
ископаемых», по теме «Обоснование и разработка энергосберегающей технологии
выемки горной массы путем создания электромагнитной подъемной установки», а
также по приоритету «Энергетика и машиностроение» по теме «Разработка системы
автоматического управления и комплексной защиты энергосберегающей
электромагнитной подъемной установки».
Литература:
1 Системы автоматизированного проектирования
/Под ред. И.П. Норенкова. - М.: Высшая
школа, 1986. - Кн. 4 –140 с.
2 Трудношин В.А.,
Пивоварова Н.В. Математические модели объектов проектирования. - 134 с.
3 Александровский Н.М.,
Егоров СВ., Кузин Р.Е. Адаптивные системы автоматического управления сложными
технологическими процессами. -М.: Энергия, 1973.