УДК-621 01
к.т.н. дотценты Ахмадов Б.Р., Исоев
У.П., и ассистент Саидамиров С.М.
Таджикский аграрный
университет имени Ш.Шотемура
г.Душанбе Республика
Таджикистан
ДВУХ КУЛИСНЫЙ ПЛАНЕТАРНО СИНУСНЫЕ
МЕХАНИЗМЫ ПРИВОДА ЧЕКАНОЧНЫХ МАШИН И ОПРЫСКИВАТЕЛЕЙ
КЛЮЧЕВЫЕ СЛОВА:
Планетарно,
синусный, механизм, кулиса, направляющий, сателлит, насос, уравнения, движения,
сила, чеканка, опрыскивания, урожайность.
Разработка планетарных синусных
механизмов привода чеканочных машин и опрыскивателей является важной задачей в
области теории сельскохозяйственной машиностроении. Использование планетарных
синусных механизмов позволяет увеличить число витков хлопчатника, тем самым
увеличить урожайность с одного гектара за счет чеканки и опрыскивания.
Изобретение относится к машиностроению и может быть
применено в сельскохозяйственных машинах и в частности, в чеканочных машинах
для обработки верхушек хлопчатника с одновременным внесением ядохимикатов.
Известен синусный механизм, содержащий корпус (стойку), кривошип, кулису,
взаимодействующие с ним ползун [1].

Рис.1
Прототипом является планетарно-синусный механизм,
который состоит из взаимосвязанных между собой кривошипа, ползуна, кулисы со
штоком насоса, направляющей, сателлита, солнечного колеса, стойки, насоса и
шарниров. Кривошип шарнирно соединен одним концом со стойкой и другим с
ползуном, расположенным в кулисе. Ползун посредством направляющей шарнирно
соединен с центром сателлита, который перекатывается по солнечному колесу.
Кулиса жестко соединена со штоком насоса. Дальнейшие развитие разработки – устранение недостатков, имеющихся в
аналогах и повышение надежности и производительности машин. Для достижения
указанной цели создан двойной синусный механизм с двойным насосом, состоящий из
кривошипов 1 и 2, шарнирно соединяющих центр вращения О с двухползунным
кулисным механизмом, содержащим ползуны 3, 4 и направляющие 5 и 6,
расположенных в полости кулисы 7. Направляющие 5 и 6 шарнирно соединены
соответственно с сателлитами 8 и 9, которые перекатываются по солнечному колесу
10. К кулисе 7 жестко присоединены штоки 11 насосов 12 со стойками 13.
Техническое решение поясняется прилагаемым чертежом,
где изображена принципиальная схема устройства, где φ1 и φ2
– углы поворота соответственно кривошипов 1 и 2.
Механизм работает следующим образом: при вращении
кривошипов 1 и 2, ползуны 3 и 4 совместно с направляющими 5 и 6 совершают
возвратно-поступательные движения внутри кулисы 7. При этом сателлиты 8 и 9
перекатываются по солнечному колесу 10. Так как штоки 11 и насосы 12 жестко
прикреплены к кулисе 7, они совершают возвратно-поступательные движения и
насосы 12 выполняют полезную работу (например, опрыскивают ядохимикаты в стебли
хлопчатника).
Рабочими органами являются сателлиты 8 и 9
одновременно являющимися режущими аппаратами чеканочных машин и насосы 12,
предназначенные для внесения ядохимикатов показано на (рис 1).
Совершенствование этого механизма является устранение недостатков, имеющихся в аналогов
и повышение надежности и производительности чеканочных машин и опрыскивателей.
В связи с этим, разработана и созданная
двух кулисный планетарно- синусный механизм является важной в области
сельскохозяйственных
машиностроение. Предложено двух кулисный планетарно- синусный механизм
содержит корпус размещение в нем солнечное колесо, взаимодействующие с ним два
сателлита, два кривошипа, два ползуна, два кулиса, два направляющей, два штока
насоса, два насоса и стойки. Сателлиты одновременно являются роторный режущих аппаратов чеканочных машин,
насоси также выполняют полезную работу, предназначены для внесения
ядохимикатов.
Устройство (рис.2) состоит из
кривошипов 1,2, ползунов 3,4, кулис 5,6, направляющих 7,8, сателлитов 9,10,
солнечное колеса 11, штоки 12,13, насосов 14,15 и стойки (корпуса) 16.
Механизм работает следующим образом: При
вращения кривошипов 1,2, ползуны 3,4
совместно с направляющими 7,8 совершают возвратно поступательное движения
внутри кулисы 5,6 и одновременно совершают поступательное движения штоки 12,13
и насоси 14,15. При этом сателлиты 9,10, перекатываются по солнечному колесу
11, так как штоки 12, 13 и насосы 14,15 жестко закреплены на кулисах 5, 6 то
совершают возвратно поступательное движения штокы 12, 13 и насосы 14, 15
выполняют полезную работу так как
опрыскивают ядохимикаты в стеблей хлопчатника. Следует отметит, что
сателлиты 9,10 и насосы 14, 15 являются рабочими органами. 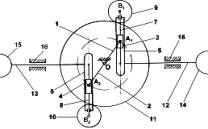

Рис. 2. Рис. 3.
Обозначим
О1А1=R радиус
ведущего звена, АВ=l длина направляющей, АД=l1 длина
ползуна, ВР=r радиус сателлита колеса, R=О2Р.
Исследуемый механизм может использоваться в качестве привода
рабочих органов чеканочных машин. Работоспособность привода ножей чеканочных
машин характеризуется в основном активностью их ножей. Целью конструирования
новых приводных механизмов является повышение эффективности и увеличение
производительности чеканочных аппаратов при срезании верхушек хлопчатника.
Динамическая схема исследуемого класса приводного механизма
при видена на рисунке 3, параметры которого равны: О1А1=О1А2=R1 – радиус
ведущего звена (кривошипа) 1, В1Р1=В2Р2=r – радиус сателлита5, l1=А1В1=А2В2
– длина ползунов 7, ![]() – угол поворота
ведущего звена 1 и R=О1Р1=О2Р2
– расстояние линии касания сателлита и солнечного колеса до оси вращения
кривошипа Оr .
– угол поворота
ведущего звена 1 и R=О1Р1=О2Р2
– расстояние линии касания сателлита и солнечного колеса до оси вращения
кривошипа Оr .
Кинетическая энергия механизма согласно рисунку 3, равна
![]()
![]()
![]() .
(1)
.
(1)
После некоторых преобразований:
![]()
![]() , (2)
, (2)
или
![]() (3)
(3)
Согласно рис. 4. приведенный
момент инерции определяется выражением:
![]() ,
(4)
,
(4)
Кинетическая энергия звена приведена
![]() , (5)
, (5)
Используя уравнения Лагранжа II рода, определим уравнение движения механизма:
![]() ,
(6)
,
(6)
Отсюда
![]()
![]() , (7)
, (7)
![]()
![]()
![]() .
.
Левая часть
![]()
![]() .
.
Обобщенную силу определим из расчета только из F
![]() ,
,
тогда
![]() ,
,
где
![]()
![]() ,
,
Уравнения движения равно:
![]() ,
,
или
![]() . (8)
. (8)
Решение уравнения движения приводного
механизма чеканочных машин позволяет использовать его при проектировании
приводных механизмов ножей этих машин.
Исследование динамических
характеристик планетарных синусных механизмов привода опрыскивателей (борьба с
сельхоз вредителей) и чеканочных машин является одним из основных проблемой
проектирование сельскохозяйственных машиностроение.
На рис.3. приведена динамическая схема
планетарно синусного механизма чеканочных машин и опрыскивателей.
Решая нелинейное уравнения (8) движении
планетарных синусных механизмов, позволяет определить параметры агрегатов и
проектировать машинный агрегат с одним сателлитом (ротором) и насосом, с двух
сателлитным и двухнасосным механизмов, а также двух планетарно – синусный
механизм с двойным насосом и кулисой, позволяющий увеличить урожайность
технических культур на 5…8 % (хлопчатника).
На рис. 4. Приведена экспериментальная установка
механизма.

ПРЕИМУЩЕСТВА: 1. Предложенный механизм
позволит получать переменные скоростные характеристики, требуемые для
обеспечения технологического процесса. 2. Изменение конструкции механизма
позволяет увеличить ширину захвата чеканочных машин и опрыскивателей.
ЛИТЕРАТУРА
1.Тилоев С. и др. Малые патенты
РТ Тj 202 Планетарно-синусный
механизм, Тj 227 Двойной
синусный механизм с двойным насосом, Тj
268
2. Двух кулисный
планетарно-синусный механизм. Душанбе 2008-2009г.
Бюл.53-56.
3. Тилоев С. и др.
Автореферат канд. диссертации. Каунас. 1998г. 18 стр.
4. Тилоев С. и др. Материалы I, II и III Международной конференции
«Механика – 94», «Механика – 97», «Выбротехника – 98»,
Вильнюс,
Каунас. 1994, 1997 и 1998 гг.