Mel’nick V.N.
National Technical
University of Ukraine “KPI”
Effect of ultrasonic waves on
the gyros gimbal
The gyrodevice is “off”. As it can be seen, the output signal of the angle
rate sensor in the ultrasound beam undergoes stochastic changes at the value
(Fig. 1) and the sign (Fig. 2). The value of
"zero shift" can grow to ![]() in terms of angle
rate). At the
in terms of angle
rate). At the ![]() , "zero shift"
is practically missed, more exactly, it is below the sensitive threshold of the
sensor. Minor changes in sign in the
output signal occur in
, "zero shift"
is practically missed, more exactly, it is below the sensitive threshold of the
sensor. Minor changes in sign in the
output signal occur in ![]() (Fig. 1). Instead, when
(Fig. 1). Instead, when ![]() , they do not only range in sign, but have a substantial
range in the amplitude. If the angle
, they do not only range in sign, but have a substantial
range in the amplitude. If the angle ![]() , the range of values is greater than
, the range of values is greater than ![]() , but always an unchanged sign.
, but always an unchanged sign.
Obviously,
the existing "zero shift"
in the ultrasonic ДУСУ sensor rays when the gyromotor is off is determined the
integral reaction of the gyroscope gimbal components. First of all, it concerns the current-collectors of the
potentiometer, which look like a console. Not the least part play the nonlinear
oscillations of the "float"
surface as well as emerging caustic areas which are results of resonance
phenomena of wave coincidence.
The gyrodevice is “on”. Of course, under these conditions serious changes of
the output signal of the device will take place due to a gyroscopic reaction.
If ![]() , the device error
, the device error ![]() is being increased
almost in ten times and changes its sign (Fig. 1). The maximum value of it
reaches
is being increased
almost in ten times and changes its sign (Fig. 1). The maximum value of it
reaches![]() . The average value equals
. The average value equals ![]() . If
. If ![]() , the average error
, the average error ![]() and its maximum value
and its maximum value
![]() is slightly decreased
in magnitude, but changes its sign for the opposite:
is slightly decreased
in magnitude, but changes its sign for the opposite: ![]() ,
, ![]() .
.
A turn
of the ДУСУ body at the angle ![]() allows stabilize the
error of the device in time at the level
allows stabilize the
error of the device in time at the level ![]() . A turn of the ДУСУ body at the angle
. A turn of the ДУСУ body at the angle ![]() allows reduce the
average error to the value.
allows reduce the
average error to the value. ![]() . However, the range of values will be. In addition a superposition
of short-period and long-period components take place. If the angle
. However, the range of values will be. In addition a superposition
of short-period and long-period components take place. If the angle
![]() , the ДУСУ output signal has a minimal variation in
amplitude, and the
, the ДУСУ output signal has a minimal variation in
amplitude, and the
Fig.
1. The ДУСУ output signal at ![]() ;a thin line – the gyrodevice is “off” ; a thick line – the gyrodevice is “on”
;a thin line – the gyrodevice is “off” ; a thick line – the gyrodevice is “on”

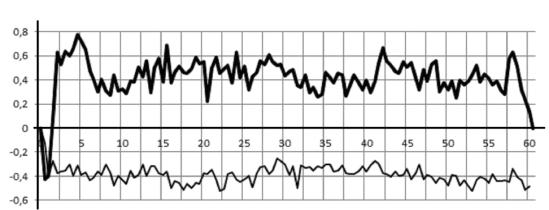 Fig. 2. The ДУСУ output signal at
Fig. 2. The ДУСУ output signal at ![]() : a thin line – the gyrodevice is “off”; a thick line – the gyrodevice is “on”
: a thin line – the gyrodevice is “off”; a thick line – the gyrodevice is “on”
average error does
not exceed ![]() . A turn of the ДУСУ body at the angle
. A turn of the ДУСУ body at the angle ![]() practically does not
change the situation. The same concerns the numerical values. At the turning angles
practically does not
change the situation. The same concerns the numerical values. At the turning angles ![]() and
and ![]() the diagram of the
error is not changed. The average value also won’t be changed.
the diagram of the
error is not changed. The average value also won’t be changed.
![]()
and remains stable
over time. At the same time a slight range appears. Thus, the angular
orientation of the ДУСУ body at values ![]() ,
,![]() ,
, ![]() and
and![]() practically have no effect on the diagram of the device’s
error over time.
practically have no effect on the diagram of the device’s
error over time.