Куракбаев Д.С, Самбетова Р.А., Ибрагимов
У.М.
Южно-Казахстанский государственный
университет им. М.Ауезова, Шымкент, Казахстан
об Одном алгоритме решения задачи избежания столкновений фазовой точки в
управляемой системе
Пусть дана
управляемая система [1]
 (1)
(1)
где ![]() –фазовый вектор,
–фазовый вектор, ![]() –вектор управления, принимающий свои значения из области
–вектор управления, принимающий свои значения из области ![]() ,
являющаяся компактным подмножеством
,
являющаяся компактным подмножеством ![]() .
.
Для формулировки принципа максимума мы рассмотрим еще одну систему уравнений относительно допольнительных
переменных ![]()
 . (2)
. (2)
Вводя ![]() -мерный вектор
-мерный вектор ![]() и функцию Понтрягина
и функцию Понтрягина
 , (3)
, (3)
мы можем записать уравнения (1) в виде
 ,
, ![]() (4)
(4)
и  (5)
(5)
в виде гамильтоновой системы
 , (6)
, (6)
 . (7)
. (7)
Теорема [2]. Пусть ![]() , - такое допустимое управление, переводящее фазовую точку из положения
, - такое допустимое управление, переводящее фазовую точку из положения
![]() в положение
в положение ![]() , a
, a ![]() - соответствующая
траектория, так что
- соответствующая
траектория, так что ![]() . Для оптимальности управления
. Для оптимальности управления ![]() и траектории
и траектории ![]() необходимо
существование такой ненулевой непрерывной вектор-функции
необходимо
существование такой ненулевой непрерывной вектор-функции ![]() , соответствующей функциями
, соответствующей функциями ![]() и
и ![]() , что:
, что:
10. для всех ![]() , функция
, функция ![]() переменного
переменного ![]() достигает в точке
достигает в точке ![]() максимума
максимума
![]() ; (8)
; (8)
20. в конечный момент ![]() выполнено соотношение
выполнено соотношение
![]() . (9)
. (9)
Пример [3]. Пусть ![]() - тело (материальная
точка), которое может совершать прямолинейное движение (рис.1). Массу этого
тела будем предполагать постоянной и равной
- тело (материальная
точка), которое может совершать прямолинейное движение (рис.1). Массу этого
тела будем предполагать постоянной и равной ![]() , а его размерами будем пренебрегать. Координату тела
, а его размерами будем пренебрегать. Координату тела ![]() будемь обозначать
через
будемь обозначать
через ![]() . При движении тела
. При движении тела ![]() его координата
его координата ![]() меняется с течением
времени. Производная
меняется с течением
времени. Производная ![]() представляет собой
скорость движения тела
представляет собой
скорость движения тела ![]() . Будем предполагать, что на тело
. Будем предполагать, что на тело ![]() действуют две внешние
силы: сила трения
действуют две внешние
силы: сила трения ![]() и упругая сила
и упругая сила ![]() , кроме того тело
, кроме того тело ![]() снабжено двигателем.
снабжено двигателем.
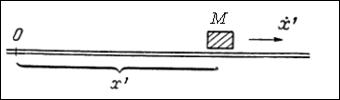
Рис. 1 – Движение тела (материальной точки)
Развиваемую двигателем силу воздействия
на тело ![]() обозначим через
обозначим через ![]() . Таким образом, по второму закону Ньютона движение тела
. Таким образом, по второму закону Ньютона движение тела ![]() с течением времени
будет описывать дифференциальным уравнением
с течением времени
будет описывать дифференциальным уравнением
![]() (10)
(10)
Обозначив скорость движения через ![]() , мы сможем записать закон движения в виде следующей системы
дифференциальных уравнений:
, мы сможем записать закон движения в виде следующей системы
дифференциальных уравнений:
 (11)
(11)
Далее, рассмотрим случай, когда сила
трения и упругая сила отсутствуют (![]() ,
, ![]() ), масса
), масса ![]() равна единице (
равна единице (![]() ), а управляющий параметр подчинен ограничениям
), а управляющий параметр подчинен ограничениям ![]() . Иначе говоря, мы рассматриваем материальную точку
. Иначе говоря, мы рассматриваем материальную точку ![]() массы
массы ![]() , свободно и без трения движущуюся по горизонтальной прямой и
снабженную двигателем, развивающим силу
, свободно и без трения движущуюся по горизонтальной прямой и
снабженную двигателем, развивающим силу ![]() , где
, где ![]() .
.
Согласно (11) уравнения движения тела ![]() имеют вид
имеют вид
 (12)
(12)
Функция ![]() в рассматриваемом
случае имеет вид
в рассматриваемом
случае имеет вид
![]() , (13)
, (13)
а матрица ![]() записывается в виде
записывается в виде
 .
.
Далее, для вспомогательных переменных ![]() мы получаем систему
уравнений
мы получаем систему
уравнений
![]() ,
,
откуда ![]() (
(![]() - постоянные).
Соотношение (8)
дает нам (учитывая (13) и условие
- постоянные).
Соотношение (8)
дает нам (учитывая (13) и условие ![]() )
)
![]() . (14)
. (14)
Из (14)
следует, что каждое оптимальное управление ![]() , являются кусочно-постоянной функцией, принимающей значения
, являются кусочно-постоянной функцией, принимающей значения ![]() и имеющей не более
двух интервалов постоянства (ибо линейная функция
и имеющей не более
двух интервалов постоянства (ибо линейная функция ![]() не более одного раза меняет знак на
отрезке
не более одного раза меняет знак на
отрезке ![]() ).
).
Для отрезка времени, на котором ![]() , мы имеем (в силу системы (12))
, мы имеем (в силу системы (12))

(![]() - постоянные
интегрирования), откуда получаем
- постоянные
интегрирования), откуда получаем
![]() , (15)
, (15)
где ![]() - постоянная. Таким
образом, фазовые
траектории, для которого
- постоянная. Таким
образом, фазовые
траектории, для которого ![]() , представляет собой дугу параболы.
, представляет собой дугу параболы.
Аналогично, для отрезка времени, на котором ![]() , мы имеем
, мы имеем
![]() ,
,
 ,
,
откуда
получаем
![]() . (16)
. (16)
На следующей рисунке (рис.2) изображено все полученные таким образом фазовые траектории (![]() -траектория уравнения (15), расположенная в нижней
полуплоскости;
-траектория уравнения (15), расположенная в нижней
полуплоскости; ![]() -траектория
уравнения (16), расположенная в верхней
полуплоскости). Фазовая точка движется по проходящей через начальную точку
-траектория
уравнения (16), расположенная в верхней
полуплоскости). Фазовая точка движется по проходящей через начальную точку ![]() траектории
уравнеия (16), если точка
траектории
уравнеия (16), если точка ![]() расположена выше линии
расположена выше линии
![]() и по траектории
уравнения (15), если точка
и по траектории
уравнения (15), если точка ![]() расположена ниже этой
линии. Иначе говоря, если начальное положение
расположена ниже этой
линии. Иначе говоря, если начальное положение ![]() расположено выше траектории
расположено выше траектории
![]() , то фазовая точка должна двигаться под воздействием
управления
, то фазовая точка должна двигаться под воздействием
управления ![]() до тех пор, пока она
не попадет на траекторию
до тех пор, пока она
не попадет на траекторию ![]() ; в момент попадания на траекторию
; в момент попадания на траекторию ![]() значение управления
значение управления
![]() переключается и становится
равным +1 вплоть до момента попадания в начало координат. Если же начальное
положение
переключается и становится
равным +1 вплоть до момента попадания в начало координат. Если же начальное
положение ![]() расположено ниже траектории
расположено ниже траектории
![]() , то управление
, то управление ![]() должно быть равно +1
до момента попадания на траекторию
должно быть равно +1
до момента попадания на траекторию ![]() , а в момент попадания на траекторию
, а в момент попадания на траекторию ![]() значение управление
значение управление
![]() переключается и
становится равным -1.
переключается и
становится равным -1.
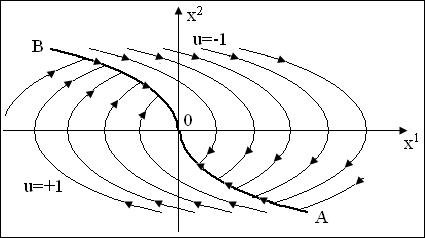
Рис. 2 –
Оптимальные траектории уравнения (12)
Таким образом, найденные траектории являются оптимальными, и других
оптимальных траекторий, ведущих в начало координат, не существует.
Литература
1.
Куракбаев Д.С. Ибрагимов У.М. Численное
моделирование задачи живучести в управляемых системах // LAP LAMBERT Academic
Publishing. Germany, 2012. -72 c.
2.
Понтрягин Л.С., Болтянский В.Г.,
Гамкрелидзе Р.В., Мищенко Е.Ф. Математическая теория оптимальных процессов.
–М.: Наука, 1969. -384 с.
3.
Болтянский В.Г. Математические методы
оптимального управления. –М.: Наука, 1968. -408 с.