Технические науки / 5. Энергетика
В.В. Каверин, Б. Е. Ахметов
Карагандинский государственный технический университет,
Республика Казахстан
Исследование динамических характеристик регулируемого электропривода
постоянного тока в режиме динамического торможения
Генераторные режимы работы регулируемого
электропривода можно разделить на две группы – тормозной режим в аварийной
ситуации при несанкционированном отключении электроэнергии с электропривода и
технологический режим при её наличии. На основании ранее проведенных
исследований следует, что когда основным требованием, к тормозному режиму являются
требования техники безопасности, необходимо обеспечить минимум тормозного пути,
обеспечив ограничение тока якоря на уровне максимально допустимых значений, а
когда определяющим фактором является технологический процесс, необходимо обеспечить
управление скоростью электропривода. В процессе синтеза систем регулирования и
ограничения выходных координат электропривода важной задачей является
определение параметров регулятора отвечающих требованиям нормативам
безопасности и технологическим требованиям с учётом номинальных значений
выходных координат электропривода, а также его значений постоянных времени и
коэффициентов. /1/.
Поставленная задача была решена на примере
регулируемого электропривода постоянного тока в режиме динамического торможения
с импульсным преобразователем повышенной частоты. Схемотехническое решение
силовой части электропривода представлено на рисунке 1.
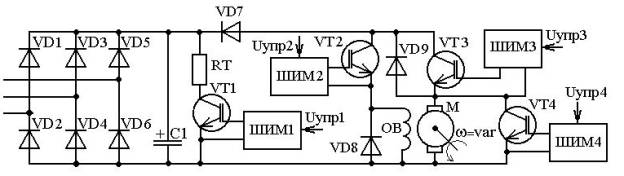
ШИМ – широтно-импульсный модулятор, RT – токоограничивающий резистор.
Рисунок 1. Принципиальная схема силовой части
регулируемого электропривода постоянного тока
Анализируемое схемотехническое решение
электропривода позволяет реализовать регулирование выходных координат в
двигательном и генераторном режимах работы.
Особенностью схемотехнического решения
силовой части (рисунок 1) является то, что электроприводу в генераторном режиме
работы не требуется электроэнергия от внешнего источника. Питание системы
управления и цепи обмотки возбуждения при несанкционированном отключении
электроэнергии, можно осуществлять от
конденсатора С1, заряд которого в генераторном режиме осуществляется от
ЭДС якоря электродвигателя. Предложенная схема позволяет реализовать
непрерывное управление торможением по цепи якоря как в технологическом режиме
работы электропривода при наличии электроэнергии, так и в аварийном при её
несанкционированном отключении.
С целью определения линейной передаточной
функции, неизменной части регулируемого электропривода постоянного тока в
режиме динамического торможения, разработана имитационная модель, которая
представлена на рисунке 2 /2/.
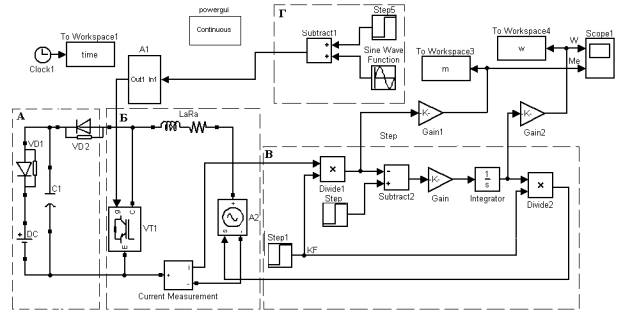
Рисунок 2 − Имитационная модель
электропривода постоянного тока в режиме динамического торможения
В результате имитационных экспериментов, была
получена ЭЛАЧХ для электродвигателя марки 4ПФ180L. Имитационные эксперименты проводились для пяти
различных значений статического задающего воздействия (СЗВ), которое изменялось
в диапазоне соответствующего режиму непрерывного тока.
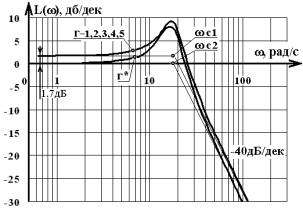
Рисунок 3. ЭЛАЧХ полученные с помощью средств
имитационного моделирования и ЛАЧХ полученные графо-аналитическим.
ЭЛАЧХ для анализируемого типа
электродвигателя имеет два участка. На первом участке величина L(w) имеет постоянное численное значение, соответствующее статическому
коэффициенту передачи, и не зависит от w, а на втором участке L(w) имеет наклон -40дб/дек. Аналогичную ЛАЧХ имеет линейное звено второго порядка.
|
|
1 |
Выражение в общем виде для вычисления ЛАЧХ
по скорости имеет вид:
|
|
2 |
Графическая зависимость ЛАЧХ по скорости представлена
на рисунке 3 г*. Используя передаточную функцию (1) можно определить значения
постоянной времени и показателя колебательности.
Таким образом, в процессе теоретических
исследований разработана методика определения статических коэффициентов
передачи и постоянных времени неизменной части регулируемого электропривода в
режиме динамического торможения.
1. Каверин В.В. Исследование и разработка
управляемых систем динамического торможения регулируемого электропривода
постоянного тока горных машин Автореф. дис. канд. техн. наук- Алматы., 2001. - 20
с.
2. И.В. Брейдо, Б.Н. Фешин, В.В. Каверин,
Г.А. Эм Методика имитационного моделирования полупроводникового электропривода
постоянного тока // Приводная техника. Россия, г. Москва 2010 №5 с 44-49