Александров
Е.В., д.т.н.
ООО «Инт-КЛАСС», Россия
МЕТОД СИНТЕЗА СИСТЕМЫ УПРАВЛЕНИЯ
АСИНХРОННОГО ЭЛЕКТРОПРИВОДА С ПРОСТЫМ РЕГУЛЯТОРОМ
Предъявляемые
к приводам наведения требования неоднозначно определяют синтезируемый закон
управления. Наиболее высокий приоритет имеют требования к точности отработки
приводом заданных воздействий и они должны строго выполняться. Однако, следует
иметь в виду, что недостаточная грубость системы, то есть ее высокая параметрическая
чувствительность и низкая помехозащищенность может сделать ее практически неработоспособной
в реальных условиях эксплуатации. По этой причине обеспечение достаточной грубости
системы является обязательным условием создания реально работоспособной и
практически эффективной системы.
Данное
обстоятельство обусловливает необходимость достижения рационального компромисса
между достигаемой точностью и грубостью системы. Реализация указанного
компромисса является одним из основополагающих принципов проектирования системы
управления привода наведения.
Наиболее приемлемым для решения
рассматриваемой задачи следует признать метод, предполагающий построение
желаемой передаточной функции синтезируемой системы, определяющей ее
оптимальное поведение, удовлетворяющее совокупности предъявляемых требований, и
синтез «простого» регулятора, обеспечивающего придание системе свойств,
описываемых желаемой передаточной функцией[1-3].
Построение желаемой передаточной функции
синтезируемой системы, соответствующей совокупности предъявляемых к ней
требований, осуществляется в результате параметрической оптимизации
передаточной функции с заданным порядком числителя и знаменателя с учетом
ограничений, отражающих требования, предъявляемые к системе привода. В качестве
минимизируемой величины (критерия
оптимизации) рассматривается полоса пропускания синтезируемой системы.
Использование указанной величины в качестве критерия оптимизации позволяет
выполнить точностные требования при меньшей мощности, габаритах и массе
исполнительного двигателя, снизить влияние на ее поведение неучтенных в
математическом описании объекта управления малых постоянных времени.
1. Уравнения объекта
управления
![]() (1)
(1)
где ![]() - переменные состояния
ОУ доступные для использования в регуляторе,
- переменные состояния
ОУ доступные для использования в регуляторе,
u
- управляющее напряжение,
![]() внешнее воздействие (момент внешних сил),
внешнее воздействие (момент внешних сил),
![]() ,
,![]() полиномы оператора дифференцирования по времени
полиномы оператора дифференцирования по времени![]() ,
, ![]()
2. Уравнения регулятора
![]() (2)
(2)
где ![]() - задающее воздействие,
- задающее воздействие, ![]() ,
,![]() искомые полиномы.
искомые полиномы.
3. Ограничения на индекс передаточных
функций регулятора
![]()
![]() (3)
(3)
![]()
где ![]() степень полинома
степень полинома ![]() ,
, ![]() заданные числа.
заданные числа.
4. Уравнение
синтезируемой системы
![]() (4)
(4)
где ![]() полиномы от р с постоянными коэффициентами.
полиномы от р с постоянными коэффициентами.
5.Желаемое
поведение синтезируемой системы определяется из условий
![]()
![]()
![]() (5)
(5)
где ![]()
![]()
![]() полиномы, коэффициенты которых определяются назначением
системы.
полиномы, коэффициенты которых определяются назначением
системы.
Синтез системы управления сводится к
определению полиномов ![]() уравнения регулятора,
удовлетворяющих условиям (3), (5).
уравнения регулятора,
удовлетворяющих условиям (3), (5).
СИНТЕЗ
РЕГУЛЯТОРА, ПРИДАЮЩЕГО СИСТЕМЕ СВОЙСТВА,
ОПИСЫВАЕМЫЕ
ЖЕЛАЕМОЙ ПЕРЕДАТОЧНОЙ ФУНКЦИЕЙ
1.Выражения, связывающие операторы
уравнений (5) и (1), (2)
![]() .(6)
.(6) ![]() (7)
(7)
![]() .(8)
.(8)
где
![]() Причем
Причем ![]() полином, поскольку деление на
полином, поскольку деление на ![]() в определяющем его
выражении происходит всегда нацело.
в определяющем его
выражении происходит всегда нацело.
Полиномы
уравнения (2) удовлетворяющие условиям (5) находятся из уравнений (6)-(8).
Положив ![]()
![]()
![]() и приравняв
коэффициенты при одинаковых степенях
и приравняв
коэффициенты при одинаковых степенях ![]() , получим систему линейных алгебраических уравнений
, получим систему линейных алгебраических уравнений
![]() (9)
(9)
где 
![]() ,
,
 ,
,
![]() - матрицы, составленные из коэффициентов полиномов
- матрицы, составленные из коэффициентов полиномов ![]() соответственно,
соответственно, ![]() М - мощность множества;
I;
М - мощность множества;
I;
![]() - коэффициенты
при рк полиномов
- коэффициенты
при рк полиномов
![]()
![]() а
а ![]() -степе-
-степе-
ни
тех же полиномов соответственно.
Считаем,
что значения ![]() -согласованы со
значением
-согласованы со
значением ![]() с учетом условия (3).
с учетом условия (3).
ПОРЯДОК ПОИСКА ПРОСТЫХ СТРУКТУР
Правило сравнения структур регуляторов: структура регулятора Р" сложнее, чем структура
регулятора Р', если в описании регулятора Р" содержатся все элементы
описания регулятора Р' и ряд дополнительных. Регулятор, в описании которого не
представляется возможным исключить какой-либо элемент без нарушения требований
к качеству системы, назван регулятором с простой структурой.
Простой
(неизбыточной) структурой будем считать допустимую
структуру а, для которой невозможно указать
допустимую структуру b, все элементы
которой входят в набор элементов структуры а.
![]() &($b
&($b![]()
где ![]() множество
простых и допустимых структур соответственно.
множество
простых и допустимых структур соответственно.
Структура
является допустимой, если удается
обеспечить формирование вектора решения х надлежащим
выбором значений его активных координат, перечисляемых данной структурой.
Задача поиска
неизбыточных структур состоит в определении всех допустимых структур, для
каждой из которых нельзя указать менее сложную допустимую структуру, то есть в
определении множества
![]() ,
,
где ![]() -бинарное
соотношение, отражающее понятие «проще, чем»
-бинарное
соотношение, отражающее понятие «проще, чем»
ПРИМЕР РЕАЛИЗАЦИИ МЕТОДА
СИНТЕЗА
Синтез регуляторов
для упругой электромеханической системы с инерционной нагрузкой, обеспечивающих
астатизм второго порядка по управляющему воздействию и учет в регуляторе
значения возмущения ![]() .
.
Структурная
схема объекта управления представлена на рисунке 1.
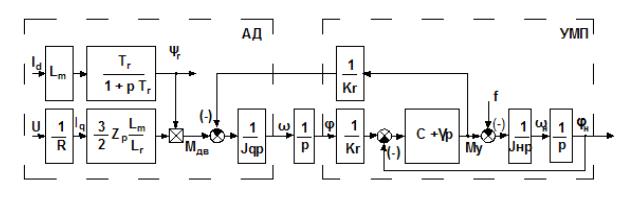
АД – асинхронный двигатель;
УМП – упругая механическая передача.
Рисунок 1–Структурная схема объекта управления
Для
использования в регуляторе доступны
переменные, составляющие: вектор ![]() а также задающее
воздействие
а также задающее
воздействие ![]() . Параметры объекта управления
. Параметры объекта управления ![]() -постоянные величины..
-постоянные величины..
Передаточные функции регулятора ![]()
![]() должны иметь порядок
знаменателя не меньше, чем порядок числителя, т.е.
должны иметь порядок
знаменателя не меньше, чем порядок числителя, т.е. ![]() а в передаточной
функции
а в передаточной
функции ![]() порядок знаменателя должен быть больше, чем порядок числителя,
т.е.
порядок знаменателя должен быть больше, чем порядок числителя,
т.е.![]() .
.
Найденные в результате проведенного
синтеза простые структуры регуляторов, удовлетворяющие заданным требованиям к
синтезируемой системе, приведены в таблице 1.
В столбцах таблицы с заголовками ![]() указаны номера ненулевых
коэффициентов полиномов
указаны номера ненулевых
коэффициентов полиномов ![]() уравнения регулятора.
В последнем столбце указана оценка грубости соответствующей структуры
регулятора, в качестве которой использовалось число обусловленности матрицы FS, составленной из столбцов Fj матрицы F
с номерами
уравнения регулятора.
В последнем столбце указана оценка грубости соответствующей структуры
регулятора, в качестве которой использовалось число обусловленности матрицы FS, составленной из столбцов Fj матрицы F
с номерами ![]()
В таблице 1
представлены структуры с оценкой грубости cond FS£107. Структурная схема системы привода
наведения с вариантом регулятора, определяемого
набором ![]() , представлена на рисунке 2.
, представлена на рисунке 2.
Таблица 1 – Простые структуры
регуляторов
|
Вариант |
jн |
wн |
j |
w |
Iq |
r |
Cond
FS |
|
S1 |
0,1,2 |
2 |
|
|
2 |
2 |
|
|
S2 |
0,1,2 |
|
|
|
2 |
1.2 |
|
|
S3 |
0,1,2 |
|
|
2 |
|
1.2 |
|
|
S4 |
0,1,2 |
2 |
|
|
1 |
2 |
|
|
S5 |
0,1,2 |
2 |
2 |
|
|
2 |
|
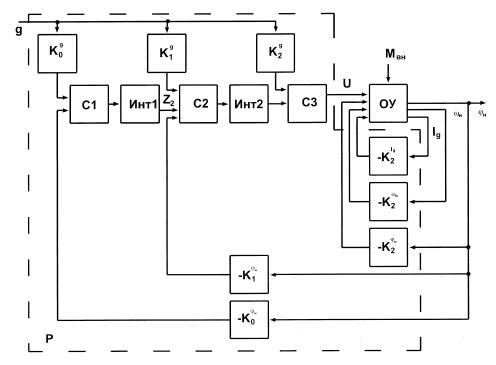
Рисунок 2 - Структурная
схема системы с регулятором S2
Приведенный пример
показывает реализацию метода синтеза структур и регуляторов обладающих низкой чувствительностью к параметрическим возмущениям, обусловленным
нестабильностью в широких пределах параметров электромеханической части привода -
жесткость и коэффициент демпфирования механической передачи, моменты инерции
нагрузки и сил сопротивления. Заметим,
что для решения предложенной задачи методом модального управления с
наблюдателем Люенбергера имеем систему восьмого порядка, в которой
представляется возможным управлять в процессе синтеза распределением только 5
полюсов. Для обеспечения астстизма по возмущающему воздействию порядок системы
повысится до 9. Использование предлагаемого подхода позволяет при тех же
исходных данных обеспечить заданный астатизм и управлять распределением 7
полюсов при порядке системы равном 7.
Литература
1. Александров
E.B.,
Мозжечков В.А [и др]. Синтез высокоэффективных законов управления
электроприводом с нежесткой механикой // Известия ТулГУ. Сер.: Приборы
специального машиностроения. - Тула, 2002.- Вып. 5(ч.1). - С. 309-310.
2. Александров Е.В.,
Мозжечков В.А. Синтез линейных регуляторов для систем электропривода с
нежесткой механикой // Известия ТулГУ. Сер.: Проблемы управления
электротехническими объектами. - Тула, 2002. Вып.2. - С.110.
3. Александров
Е.В. Прецизионный асинхронный электропривод: методы синтеза структур и
алгоритмов управления: монография / под общ. ред. акад. РАН А.Г.Шипунова. – Тула:
Из-во ТулГУ, 2010. – 184 с.