Технические
науки/2. Механика.
к.ф.-м.н.,
доцент А.У. Нуримбетов А.У., Туреханова Г.С., Жанбосынов Р.С.
Таразский
государственный университет им. М.Х.
Дулати, Казахстан
Деформация естественно-закрученных
многослойных анизотропных стержней при кручении и растяжении
В данной работе рассматривается деформация
многослойных стержней при кручении и растяжении. При чем в последнем случае
рассматривается напряженно-деформированное состояние (н.д.с.)
естественно-закрученных стержней типа
лопаток турбомашин. Принятая в настоящее время технология изготовления
деталей, элементов конструкций из композиционных материалов (к.м.) имеет явно
выраженную слоистую структуру [1]. Свойства отдельных слоев и их взаимное
расположение в составе пакета таких слоев, в конечном счете определяют свойства
всего материала. Поведение однонаправленного слоя полагается линейно-упругим, а
связь между напряжениями и деформациями описывается обобщенным законом Гука.
Соотношения между напряжениями ![]() и деформациями
и деформациями ![]() для слоя i определяются
из формулы
для слоя i определяются
из формулы
![]() . (1)
. (1)
Параметры ![]() являются
характеристиками упругости,
являются
характеристиками упругости, ![]() ,
, ![]() температура и тензор
тепловых расширений i-го слоя к.м. [2].
температура и тензор
тепловых расширений i-го слоя к.м. [2].
С помощью геометрических представлений для
слоистых анизотропных стержней с прямолинейной осью получены кинематические
соотношения, которые в последующем использовались для установления основных уравнений.
1. Геометрия закрученного слоистого
стержня. При рассмотрении закрученных стержней используются две основные
системы координат: неподвижная Кх и местная Кx (рис.1).
В качестве неподвижной принимается прямоугольная правая система 0xyz. Начало координат 0 расположено в центре масс начального
сечения. При этом ось z направляется
вдоль хорды, ось х перпендикулярно волокнам, но в плоскости слоя и ось у,
перпендикулярно слою. Оси x, h неподвижной системы
координат xhV при движении вдоль оси поворачивается вместе с
сечением, оставаясь главными центральными осями любого сечения. Ось V совпадает с осью z [3].
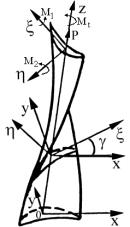
а б в
Рис.1. а) Основные системы координат для закрученных
стержней; б) элемент закрученного стержня в) cхема определения деформаций элемента при повороте сечений.
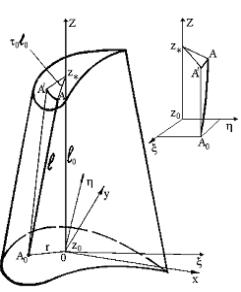
Угол a(z) начальный
угол закрученности стержня, отсчитываемый между осями х и x против движения часовой стрелки. Относительная
закрученность t0=![]() стержня в текущем сечении z=V, при увеличении z образует винтовое волокно.
Траектория перемещения точки А0 в поперечном сечении z0 при увеличении
z образует винтовое волокно. Длина винтовой дуги АА0 равна (рис.1б)
стержня в текущем сечении z=V, при увеличении z образует винтовое волокно.
Траектория перемещения точки А0 в поперечном сечении z0 при увеличении
z образует винтовое волокно. Длина винтовой дуги АА0 равна (рис.1б) ![]() (2), и она
ортогональна плоскости поперечного сечения z0+z =const.
(2), и она
ортогональна плоскости поперечного сечения z0+z =const.
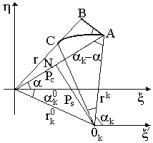
2.
Центр кручения закрученного стержня. Пусть под действием крутящих моментов
Мt точка А поворачивается на угол t относительно центра кручения Ок [4]. Точка
Ок удалена на расстояние ![]() под углом
под углом ![]() к оси x, а точка А в результате кручения занимает положение
точки С (рис. 1в). Тогда ÈАВ=rкt (rк=|ОкА|= |ОкС|).
В криволинейном треугольнике АВС
к оси x, а точка А в результате кручения занимает положение
точки С (рис. 1в). Тогда ÈАВ=rкt (rк=|ОкА|= |ОкС|).
В криволинейном треугольнике АВС
ÈАВ=ÈАС×cos(aк-a)= rкt cos(aк-a), ÈВС=ÈАС×sin(aк-a)= rкt sin(aк-a).
Здесь aк
, a -
угол между радиусами векторов, исходящими из точек Ок и О. Опустив
перпендикуляр из точек Ок на направление радиуса вектора ОА легко
получить ÐОАОк=aк-a и поэтому rкcos(aк-a)=r-![]() сos(aк+a), rкsin(aк-a)= =
сos(aк+a), rкsin(aк-a)= =![]() sin(aк+a). Следовательно, ÈАВ и ÈВС выражаются через текущие координаты относительно
основной системы координат и величины, характеризующие положение центра
кручения определяется из соотношений
sin(aк+a). Следовательно, ÈАВ и ÈВС выражаются через текущие координаты относительно
основной системы координат и величины, характеризующие положение центра
кручения определяется из соотношений
ÈАВ= t(r-pc); BC= pst; r=|ОB|=|ОA|;
pc=![]() сos(aк+a); ps=
сos(aк+a); ps=![]() sin(aк+a); pc +ps=
sin(aк+a); pc +ps=![]() ; |ОкN|=r-pcx/r-pst/r. (3)
; |ОкN|=r-pcx/r-pst/r. (3)
3. Кинематика естественно закрученного стержня. 3а. Удлинение
винтового волокна, обусловленное кручением t. В результате начальной закрутки t0 и
дополнительной закрутки деформации кручения t длина ![]() отрезка А0А станет А0В (рис.
2)
отрезка А0А станет А0В (рис.
2)
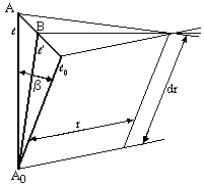
Рис. 2.
Схема определения деформаций элемента при повороте сечений.
 (4)
(4)
где pc, ![]() определяются из (3), а
определяются из (3), а ![]() угол наклона волокна
по отношению к оси стержня. Следовательно, удлинение винтового волокна,
обусловленное кручением t, приближенно находится из выражения
угол наклона волокна
по отношению к оси стержня. Следовательно, удлинение винтового волокна,
обусловленное кручением t, приближенно находится из выражения
![]() , (5)
, (5)
где р=r-pc. При вычислении ![]() t считались
малыми члены, содержащие параметр t в третьей и более высоких степенях. Если центр
кручения совпадает с осью стержня (
t считались
малыми члены, содержащие параметр t в третьей и более высоких степенях. Если центр
кручения совпадает с осью стержня (![]() =0, р=r) и при этом в
выражении (5) сохранить первое слагаемое, то из него непосредственно следует
соответствующее выражение работы [4].
=0, р=r) и при этом в
выражении (5) сохранить первое слагаемое, то из него непосредственно следует
соответствующее выражение работы [4].
3б. Удлинение винтового волокна,
обусловленное растяжением и изгибом.
Аналогично (4) вычисляется удлинение винтового волокна, обусловленное
растяжением![]() и изгибом c1, c2. При
этом, деформации находятся из выражения
и изгибом c1, c2. При
этом, деформации находятся из выражения
![]() (6).
(6).
Здесь e относительное удлинение волокна за счёт растяжения, а
cj (j=1,2) - изменение его кривизны. При малых
деформациях выражения (6) совпадают с соотношениями
работ [5].
3в. Растяжение, изгиб и кручение
винтового волокна. При сочетании растяжения, изгиба и кручения общая
продольная деформация винтового волокна оценивается величиной ![]() (7), проекции которой на оси неподвижной
системы координат Кх
(7), проекции которой на оси неподвижной
системы координат Кх ![]() (8), определяют
продольные и поперечные деформации стержня, обусловленные его начальной закрученностью.
(8), определяют
продольные и поперечные деформации стержня, обусловленные его начальной закрученностью.
В последующем исследовании кинематические
соотношения для слоя i выбраны в форме ![]() (9), в которой
(9), в которой ![]() - соответствуют
значениям максимальной деформации поперечного сечения, обусловленной
поперечными силами; величины
- соответствуют
значениям максимальной деформации поперечного сечения, обусловленной
поперечными силами; величины ![]() позволяют оценить
влияние перемещений
позволяют оценить
влияние перемещений ![]() в плоскости поперечного
сечения на сдвиговые деформации и
в плоскости поперечного
сечения на сдвиговые деформации и ![]() =0.5(
=0.5(![]() ) деформации элементов поперечного сечения. Таким образом, в
развитие работ [4], [5], [6] деформации
) деформации элементов поперечного сечения. Таким образом, в
развитие работ [4], [5], [6] деформации ![]() определяются суперпозицией
трех типов деформации
определяются суперпозицией
трех типов деформации ![]() и
и ![]() .
.
3. Равновесие закрученных стержней. При исследованиях равновесия стержней обычно
применяют уравнения в интегральной форме, приводя напряжения в текущем сечении z0 к статистически эквивалентной системе усилия Р и
моментов М1, М2 , Мt , приложенных к оси стержня [4].
Величины Р, М1, М2
определяются как равнодействующие сила и моменты в поперечном сечении от
нормальных напряжений szz
szz=![]() , (10)
, (10)
где ![]() и
и ![]() берутся из
зависимости (9):
берутся из
зависимости (9):
![]() . (11)
. (11)
При определении крутящего момента Мt необходимо учесть, что напряжения ![]() , действующие вдоль винтовых волокон под углом b=t0r к поперечному
сечению, имеют проекцию на поперечное сечение
, действующие вдоль винтовых волокон под углом b=t0r к поперечному
сечению, имеют проекцию на поперечное сечение ![]() t0r, которая вызывает
дополнительный крутящий момент. Поэтому
t0r, которая вызывает
дополнительный крутящий момент. Поэтому
![]() (12)
(12)
Если в уравнение (11), (12) подставить
выражения (10), то легко получить разрешающую
систему уравнений ![]() (13), в котором
вектор обобщенных сил
(13), в котором
вектор обобщенных сил ![]() определяется через вектор обобщенных деформаций
определяется через вектор обобщенных деформаций ![]() и векторы
и векторы ![]() , устанавливающие влияние поперечных сил, напряжений в
плоскости сечения и температуры.
, устанавливающие влияние поперечных сил, напряжений в
плоскости сечения и температуры.
Система уравнений (13) является нелинейной
относительно компонент вектора обобщенных деформаций ![]() . Максимальная деформация поперечного сечения
. Максимальная деформация поперечного сечения ![]() (k=1,2) может
быть выражена через заданные поперечные силы Qj энергетическим методом [2], и определяется из
равенства, аналогичных следующим
(k=1,2) может
быть выражена через заданные поперечные силы Qj энергетическим методом [2], и определяется из
равенства, аналогичных следующим
![]() =-QkNk,
(к=1,2),
=-QkNk,
(к=1,2),  , (j=1, k=4); (j=2, k=5). (14)
, (j=1, k=4); (j=2, k=5). (14)
По найденным величинам ![]() вычисляется
компоненты вектора
вычисляется
компоненты вектора ![]() в слое i.
в слое i.
Влияние напряжений и деформаций,
действующих в плоскости поперечного сечения, может быть установлена
итерационными методами, предложенными в [3], путем решения плоской задачи
теории упругости. Координаты центра кручения могут быть найдены из условии кj4=0 (j=2, 3). В
работах [4], [5] уравнения (9)
используется в линеаризованной форме ![]() (15), которая при
необходимости может быть уточнена в соответствии с (8). В дальнейшем с помощью
соотношения (2), (7) вычисляются напряжения в каждом слое i в рамках предположений, принятых при получении уравнений
(15).
(15), которая при
необходимости может быть уточнена в соответствии с (8). В дальнейшем с помощью
соотношения (2), (7) вычисляются напряжения в каждом слое i в рамках предположений, принятых при получении уравнений
(15).
Характерной особенностью приведенных
уравнений, связанных со слоистой структурой стержней, является то, что
параметры кmn (m,n=1,4) из матрицы К меняются от слоя к слою и для
вычисления используются специально созданные программы. Кроме того, из-за
изменения ориентации слоя относительно системы координат параметры упругости ![]() является переменными.
является переменными.
Следует отметить, что взаимосвязанность
растяжения, изгиба и кручения являлось предметом многочисленных исследований.
Однако в основном они касались стержней из изотропных материалов. В стержнях из
слоистых материалов эта взаимосвязанность проявляется в большой мере из-за
возможной структурной несимметричности. Так, например, в незакрученном стержне
(t0=0) параметры жесткости k4j (j=1,2,3)
могут отличаться от нуля и в связи с этим появляется эффект кручения при
простом растяжении или изгибе.
Полученная приближенная теория закрученных
слоистых стержней произвольного сечения
основана на определенных гипотезах, позволяющих разделить компоненты напряжений
и деформаций на главные и второстепенные, которым в ряде уравнений пренебрегается.
Достоверность приближенной теории закрученных слоистых стержней проверяется
сопоставлением с известными для некоторых частных случаев решениями и сравнением
результатов расчетов с экспериментальными данными. Результаты расчета на ЭВМ по
линейным соотношениям настоящей работы лучше согласуются с экспериментальными
данными, чем существующие в литературе линеаризованные зависимости. Это подтверждает,
что предлагаемое кинематическое соотношение (5) полнее отражает взаимовлияние
деформации кручения и растяжения.
Литература:
1. Нуримбетов А.У. Автоматизированное
проектирование раскроя деталей произвольного поперечного сечения из слоистых
композиционных материалов // Вестник РУДН. Серия «Инженерные исследования». М.: - 2009 - №4.- С. 92-101.
2. Нуримбетов А.У. Решение задачи кручения слоистых композиционных
стержней произвольного сечения методом конечных элементов //Строительная
механика и расчет сооружений. М.: -
2009. -№4.- с.24-30.
3.
Нуримбетов А.У. Полупространственная теория кручения композиционного слоистого
стержня произвольного сечения. // Строительная механика инженерных конструкций
и сооружений. М.: - 2010- № 1.
4. Биргер
И.А. Пространственное напряженное состояние в лопатках с начальной закруткой.
//Тр. ЦИАМ. - 1982. - № 996, с. 7-23.
5. Krenk S. The Torsion-Extstension
Conpling in Pretwistet Elastic Beams. //Int. of. Solids Structures. -
1982.-V.19., №1, pp. 67-72.
5. Hodqes D.H. Torsion of Pretwistet Beams
Due to Axial Loadinq. //J. Appl. Mech. - 1980. - V.42, №7, pp. 393-397.
6. Шорр Б.Ф. К
экспериментальной проверке теории растяжения закрученных стержней // Изв. АН
СССР. Механика твердого тела.- 1972. -№5. - С. 147-153.