EXPERIMENTAL STUDY OF VERTICAL
MOVEMENTS OF IN-PIPE INSPECTION ROBOT
S. Jatsun, doctor of
technical sciences, professor, the head of the department of theoretical
mechanics and mechatronics, South-West state university, (е-mail: teormeh@inbox.ru)
S. Savin, post-graduate
student of the department of theoretical mechanics and mechatronics, South-West
state university, (е-mail: sergey89mtkgtu@mail.ru)
S. Rublev, post-graduate student of the department of theoretical mechanics and
mechatronics, South-West state university, (е-mail: teormeh@inbox.ru)
In the present article the experimental study of vertical movements of
in-pipe monitoring robot is discussed. The results of the experiments are
shown.
Key words: in-pipe monitoring robot, testing stand, experiments, results.
Introduction
Nowadays there is an urgent problem of designing
devices, for automatization of control and diagnostic of pipes inner surface,
as well as there is a problem of designing vehicles for navigation inside
pipelines. In papers [1-3] authors pointed out the importance of creating and
using in-pipe robots as they can decrease the cost of maintaining pipelines of
different sorts. In papers [4] and [5] it is pointed out that the designing of
new in-pipe robots is important because most of the pipelines are buried
underground or placed in such way that it is difficult to gain an access to the
pipes. That makes it impossible for humans to work directly with the pipe-line
without deconstructing parts of buildings or facilities, or excavating the
pipe. In articles [6] and [7] it is mentioned that the usage of in-pipe robots
for diagnostic the state of gas pipelines, situated near houses and apartment
blocks, is important as it can gives us detailed information about the state of
the pipes and this information is critical for the companies that maintain such
pipelines. Also the usage of in-pipe robots for that purpose can help us locate
gas leakages, which is important for people security.
The design of the robot
In this article we want to discuss an in-pipe robot
consisted of two modules. The first module called inserted module. The inserted
module is moving along the pipe and transport the diagnostic equipment. The module
essentially is a link mechanism. The second module is called drive module. The
drive module stays outside the pipeline and connected with the inserted module
by flexible robes and their housings. The force generated in the drive module
transmitted to the inserted module by the means of the flexible ropes. The
inserted module consists of two sections, each can be fixated in the pipe.
When designing in-pipe robots, the question of the
impact of the weight of the equipment on the robot’s behavior is rising. For
gaining information on the subject a special testing stand was constructed.
Experimental study
The goal of the experiments, that were conducted with
use of the constructed testing stand, was to determine the value of deformation
of the flexible ropes on the different stages of the step when using weight of
the payload. Essentially, the robot was moving his first section with a payload
on it and the deformation of the flexible ropes was measured. The robot was
moving vertically in a wide enough pipe, so the moving part won’t touch the
inner surface of the pipe, during it’s movements. The value of deformation was
determined as the difference between the value h, which is how high the
first section had moved, and the value L, which represents the length,
that the ends of ropes, attached to actuators, had covered, forced by
actuators.
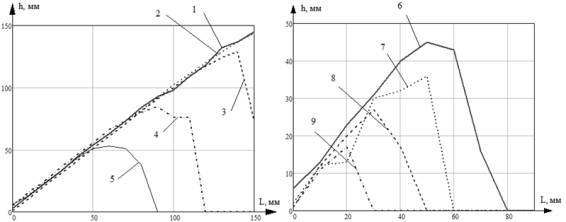
Figure 1 Relation between
the movements of the first section h and the length of ropes L. 1
– payload is 0.15 kg, 2 – 0.25 kg, 3 – 0.45 kg, 4 – 0.55 kg, 5 – 0.65 kg, 6 –
0.75 kg, 7 – 0.85 kg, 8 – 1 kg, 9 – 1.2 kg
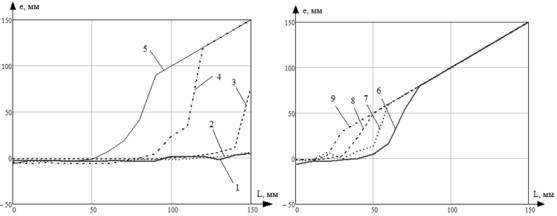
Figure 2 Relation between
e (the difference between h and L) and L
1 – payload is 0.15
kg, 2 – 0.25 kg, 3 – 0.45 kg, 4 – 0.55 kg, 5 – 0.65 kg, 6 – 0.75 kg, 7 – 0.85 kg,
8 – 1 kg, 9 – 1.2 kg
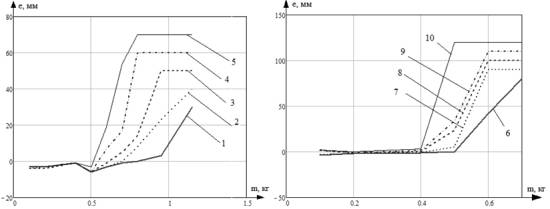
Figure 3 Relation between
e (the difference between h and L) and the value of the payload
m;
1 – L is
equal 30 mm, 2 – 40 mm, 3 – 50 mm, 4 – 60 mm, 5 – 70 mm, 6 – 80 mm, 7 – – 90 mm,
8 – 100 mm, 9 – 110 mm, 10 – 120 mm
Let us assume that regular working mode for the robot
is when the robot can keep its stability while exposed to external perturbation
actions. Let us assume that this condition is met if the value of flexible
ropes’ deformation e is less than the value L. The mode when the
robot loses stability and his form we assume to be an abnormal mode. In that
mode the value of flexible ropes’ deformation e would be larger than the
value L.
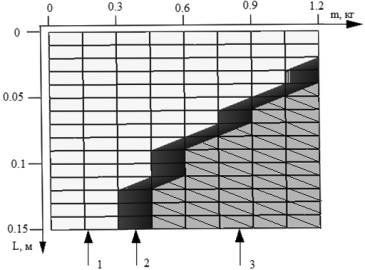
Figure 4 Parameter space of the device; 1 – the space in which the robot
is functioning in the regular mode; 2 – the space with possible bifurcations from
which the robot can move to the first space or the third space; 3 – the space in
which the robot is functioning in the abnormal mode
Making analysis of the acquired data and the result,
shown on the figure 4, we can come to the conclusion that when the weight of
the payload is increasing the maximum of the length of the step that robot can
make, while moving vertically, is decreasing. From that we can conclude that in
order to move equipment with considerable weight the robot needs to reduce the
length of it’s steps. That will increase the preciseness of robot’s movements
and guarantee the absence of emergency situations.
Conclusions
In the present paper the results of conducted experiments
are shown. The results gives us opportunity to see the characteristics of the
movements of the in-pipe robot, while moving vertically. Three parameter spaces
were discovered. The first one represents the regular mode of the robot
functioning. In that mode robot can keep its stability while exposed to
external perturbation actions. The second parameter space represents
bifurcations area, in which it is possible for the robot to move into the first
space or the third space. The last parameter space represents the abnormal mode
of the robot functioning. This data can be used in designing in-pipe robots,
that need to move vertically. Also this data can be used in programming and
making software for such robots, in order to take into account the deformation of
the flexible ropes, which depends on the number of factors, including the
weight of the payload.
REFERENCES
1
Se-gon Roh Differential-drive in-pipe robot for moving inside urban gas
pipelines / Se-gon Roh, Hyouk Ryeol Choi // IEEE Transactions on robotics, VOL.
21, NO. 1, February 2005 – 17 c.
2
Hyouk Ryeol Choi In-pipe robot with active steering capability for
moving inside of pipelines / Hyouk Ryeol Choi, Se-gon Roh // Bioinspiration and
Robotics Walking and Climbing Robots, Maki K. Habib (Ed.), ISBN: 978-3-902613-15-8,
2007 – с. 376-402
3
Se-gon Roh Navigation inside pipelines with differential-drive inpipe robot
// Robotics and Automation, 2002. Proceedings. ICRA '02. IEEE International
Conference on, Volume 3 / Washington, 2002 – 2575-2580 с
4
Shuichi Wakimoto A micro snake-like robot for small pipe inspection [Текст] / Shuichi Wakimoto, Jun Nakajima, Masanori Tanaka,
Takefumi Kanda, Koichi Suzumori // Mechanical Engineering fields, Okayama
University – Okayama, 2003 – c. 303-308
5
Ono Manabu Development of an in-pipe inspection robot movable for a long
distance / Ono Manabu, Hamano Toshiaki, Takahashi Masato, Kato Shigeo // Nippon
Kikai Gakkai Robotikusu, Mekatoronikusu Koenkai Koen Ronbunshu, 2001, №1; 91-92
с.
6
Dertien E. Basic maneuvers for an inspection robot for small diameter
gas distribution mains / Dertien E., Stramigioli S. // Robotics and Automation
(ICRA), 2011 IEEE International Conference on, Shanghai International
Conference Center – Shanghai, 2011 – с. 3447-3448
7
Dertien E. Development of an inspection robot for small diameter gas
distribution mains / Dertien E., Stramigioli S., Pulles K. // Robotics and Automation (ICRA), 2011 IEEE
International Conference on, Shanghai International Conference Center – Shanghai,
2011 – с. 5044-5049