Технические
науки/4. Транспорт
Аспирант Стрельцов С.В.
Шахтинский институт (филиал) Южно-Российского государственного
технического университета (Новочеркасский политехнический институт), Россия
Результаты экспериментальных исследований гидравлической системы
торможения крана с раздельным приводом
Гидравлическая
система торможения, представленная в [1], должна обеспечить одинаковый
тормозной момент на ходовых колесах механизма передвижения крана с раздельным
приводом. Целью исследования была проверка работоспособности системы торможения
и получение характеристик переходных процессов в системе при разных режимах
работы.
Для
эксперимента была создана модель гидравлической системы торможения. Схема
модельной установки представлена на рис. 1.
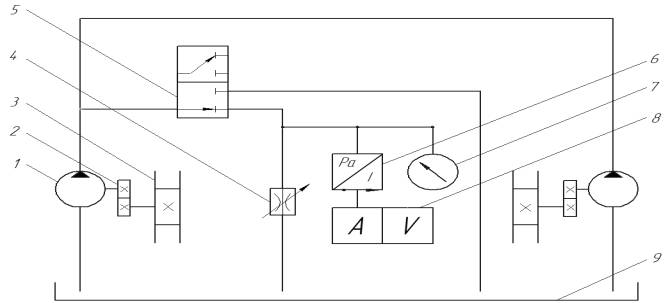
Рис. 1 – Схема модельной установки
Экспериментальная установка состоит из двух гидронасосов БГ
12-41 (1), связанных через мультипликаторы (2) с ходовыми колесами крана (3).
Напорные магистрали подключены к гидрораспределителю ПМ-2-320УХЛ4 (5). В первом
положении ключа гидрораспределитель включает в систему гидродроссель ПГ 55-22 (4),
а во втором – замыкает напорные магистрали на маслобак (9). Для измерения
давления в системе использовались датчик давления ПД100-ДИ2,5-1,0.И.11 (6) с
подключенным к нему самопишущим амперметром 6ПВ.348.130 (8) и манометр МП3-у (7).
Испытания проводились на модели башенного крана ТР-КБ-403А. Общий
вид экспериментальной установки и модели гидравлической системы торможения
показаны на рис. 2 и 3. При испытании моделировались торможение крана и движение
крана под уклон с постоянной скоростью.

Рис. 2 – Общий вид экспериментальной установки
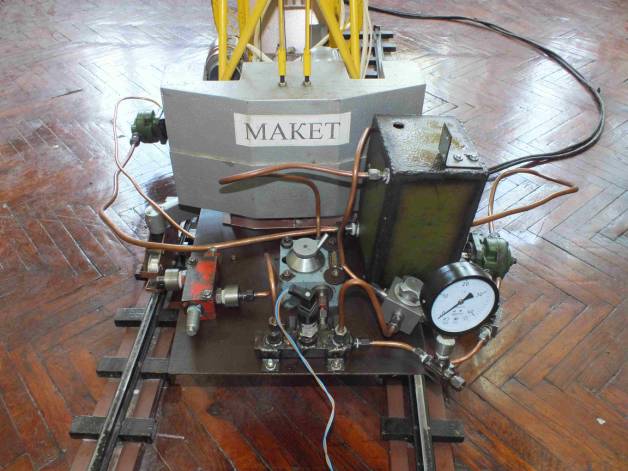
Рис. 3 – Гидравлическая система торможения
Для
моделирования процесса торможения кран разгоняли до скорости 1,5 м/с и включали
тормозную систему. Осциллограмма переходного процесса представлена на рис. 4а.
Были получены следующие результаты: время торможения – t = 2 c,
выходной сигнал датчика давления I = 6 мА, максимальное
давление в системе – P = 2 атм. Согласно
методике расчета, опубликованной в [2], максимальный тормозной момент на валу
гидронасоса составил Mт = 254,4 Н·м.
При
моделировании движения под уклон с постоянной скоростью кран двигался с
активированной системой торможения на всем протяжении пути. Осциллограмма
переходного процесса представлена на рис. 4б. Результатами исследования стали
следующие данные: скорость движения крана составила 1 м/с, выходной сигнал
датчика давления I = 5 мА, максимальное давление в системе – P = 1,5
атм, максимальный тормозной момент на валу гидронасоса составил Mт = 194,2 Н·м.
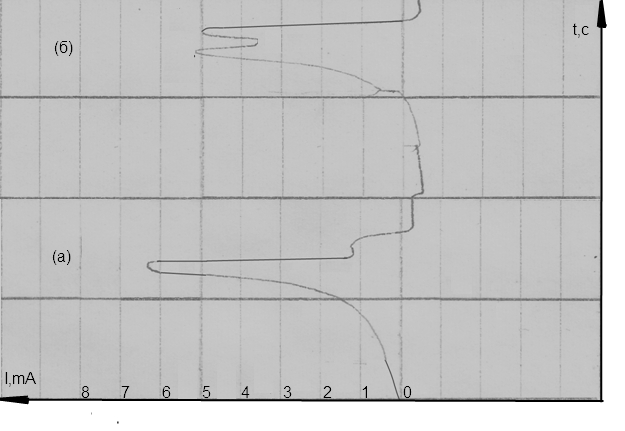
Рис. 4 – Осциллограммы переходных процессов (а – при торможении
крана; б – при движении под уклон с постоянной скоростью)
Следует
отметить, что на рис. 4б присутствуют характерные участки, причина появления
которых была описана в [1]. Так, при разгоне крана до заданной скорости на первом
участке осциллограммы отмечается рост давления в системе, вызванный увеличением
подачи насосов. Протекание большего объема рабочей жидкости через дроссель,
имеющий в данный момент времени постоянное проходное сечение, вызывает
увеличение давления в напорных гидролиниях, приводя к увеличению тормозного
момента на валах насосов. Достигая заданного настройками дросселя порогового
значения, давление в гидролиниях вызывает снижение скорости вращения вала
гидронасоса и уменьшение подачи гидронасосов. При этом давление в системе уменьшается
и снижается тормозной момент на валах гидронасосов. Скорость вращения вала
начинает расти, повышая давление до тех пор, пока оно снова не вызовет
срабатывание тормозной системы.
Испытания гидравлической
системы торможения крана с раздельным приводом показали допустимость
использования тормозных систем, созданных на основе объемных гидромашин, в
качестве механизма торможения крана.
Литература:
1. Стрельцов С.В. Гидравлическая
система комбинированного торможения козлового крана // Материалы VIII международной
научно-практической конференции «Дни науки – 2012»: Технические науки. Прага: Education and Science, 2012, С. 27-29.
2. Стрельцов С.В., Рыжиков В.А. Гидравлическая система торможения механизма
передвижения крана // Перспективы
развития Восточного Донбасса. Ч.1: сб. науч. тр.– Новочеркасск: ЮРГТУ (НПИ),
2011. - С. 86-89