Д.т.н., профессор Жадобин Н.Е., к.т.н., доцент Лебедев
А.И., генеральный директор
ООО «МИП» СЕНСОР» Волков В.П.
Государственная морская академия имени адмирала С.О. Макарова
Магнитоупругие
преобразователи механических напряжений в судовых пропульсивных установках.
Для автоматизации судовых пропульсивных
установок необходима разработка надежных методов и средств измерения основных
параметров характеризующих их работу: крутящий момент и крутильные колебания,
частота вращения гребного вала, мощность на валу судовой энергетической
установки (СЭУ), осевое усилие от упора гребного винта и продольных колебаний. При этом наибольшее распространение в
настоящее время получили методы, основанные на преобразовании упругих
деформаций в электрический сигнал. В таких системах используются
тензорезисторные преобразователи, в которых упругая деформация, вызванная
механическими напряжениями в контролируемой детали, преобразуются в изменение
сопротивления тензорезистора.
Системы, в которых в качестве первичного измерительного
преобразователя используются тензорезисторы, в целом являются весьма сложными,
с большим количеством элементов расположенных на вращающемся валу. Ввиду
сложности такие системы имеют низкую надёжность. Помимо этого такие системы
обладают низкой ремонтопригодностью, так как заменить вышедший из строя
тензорезистор в судовых условиях не представляется возможным. Так же опыт
эксплуатации тензорезисторных преобразователей показал, что через три года
эксплуатации примерно 40% из них выходит из строя [7].
Требованиям
высокой эксплуатационной надежности в наибольшей степени отвечают
магнитоупругие преобразователи (МУП), которые длительное время разрабатываются
в ГМА им. Адм. С.О.Макарова и активно внедряются на судах морского флота. В
настоящее время разработка и внедрение магнитоупругих преобразователей переданы
в ООО «Малое Инновационное Предприятие» «СЕНСОР» созданное при ГМА им. Адм.
С.О. Макарова.
Опыт эксплуатации МУП на
судах показал их высокую надежность и точность измерений, которые обусловлены
простотой конструкции, малой базой измерения и бесконтактным методом съема
сигнала. МУП нашли широкое применение в системах: автоматического контроля и
измерения крутящего момента и мощности СЭУ; контроля крутильных и продольных
колебаний валопроводов; ограничения тягового усилия буксирных и швартовых
лебедок; ограничения грузоподъемности стреловых кранов; измерения давления в
цилиндрах ДВС и проч. [1-4].
Принцип действия МУП
основан на магнитоупругом эффекте, которой в той или иной степени проявляется у
всех ферромагнитных материалов. Магнитоупругий
эффект заключается в изменении магнитных свойств ферромагнитных материалов
под действием упругих механических напряжений. Более подробно принцип действия и конструкция МУП описаны в
работах [1-3]. Наиболее перспективными, по мнению авторов, являются
трансформаторные (элементные) магнитоупругие преобразователи (ТМУП), которые
помимо перечисленных достоинств, имеют ряд дополнительных, таких как:
возможность использовать один типоразмер МУП для различных диаметров валов;
возможность измерения механических напряжений в плоских элементах конструкций;
меньшая масса и стоимость; простая технология изготовления.
Формула, описывающая
электродвижущую силу (ЭДС) ТМУП имеет следующий вид [1]:
 (1)
(1)
где: ![]() - угловая частота сети;
- угловая частота сети;
![]() - электрическая проводимость материала вала;
- электрическая проводимость материала вала;
![]() ;
;
![]() ,
, ![]() - значения магнитных
проницаемостей материала вала вдоль действия главных нормальных напряжений;
- значения магнитных
проницаемостей материала вала вдоль действия главных нормальных напряжений;
![]() - эквивалентное значение магнитной проницаемости;
- эквивалентное значение магнитной проницаемости;
![]() - угол между
координатными осями
- угол между
координатными осями ![]() , связанными с магнитопроводом преобразователя, и главными
осями анизотропии
, связанными с магнитопроводом преобразователя, и главными
осями анизотропии ![]() , совпадающими с направлением главных измеряемых напряжений;
, совпадающими с направлением главных измеряемых напряжений;
![]() - амплитудное значение магнитного потока, втекающего в
контролируемый участок вала через полюса обмотки возбуждения.
- амплитудное значение магнитного потока, втекающего в
контролируемый участок вала через полюса обмотки возбуждения.
Анализ
выражения (1) показывает, что приведённая зависимость изменяется по
периодическому закону в функции угла и имеет экстремальные значения при ![]()
где: ![]() = 0,1,2,3…..
= 0,1,2,3…..
 При
При ![]() =
=![]() ЭДС преобразователя имеет максимальное значение и равна:
ЭДС преобразователя имеет максимальное значение и равна:
Проведенный в работах [2-3]
анализ статических и динамических характеристик ТМУП, а также проведенные
экспериментальные исследования показали, что выходной сигнал ТМУП изменяется
линейно в зависимости от измеряемого механического сигнала, передаточная
функция ТМУП соответствует иррациональному динамическому звену с постоянной
времени, изменяющейся обратно пропорционально частоте питающей сети. При этом установлено что время протекания электромагнитных
процессов в ТМУП значительно меньше времени протекания механических процессов,
таким образом, ТМУП можно рассматривать как безинерционное звено.
При использовании ТМУП в валопроводах
пропульсивных установок судов он реагирует на измеряемые напряжения,
возникающие в теле вала, поэтому выходной сигнал магнитоупругого
преобразователя при однородном в магнитном отношении материале вала будет
изменяться в соответствии с законом изменения механических напряжений.
Дополнительные и случайные составляющие механического напряжения, вызванные
колебаниями и случайной составляющей измеряемой силы, приводят к амплитудной
модуляции выходного сигнала МУП. Для выходного сигнала можно записать следующее
выражение [2]:
![]()
где: ![]() - напряжение, вызванное средним значением измеряемых усилий;
- напряжение, вызванное средним значением измеряемых усилий;
![]() - напряжения, вызванные колебаниями измеряемой величины;
- напряжения, вызванные колебаниями измеряемой величины;
![]() - напряжение, вызванное случайной составляющей.
- напряжение, вызванное случайной составляющей.
![]() - частота вращения вала.
- частота вращения вала.
![]() - частота напряжения питания преобразователя.
- частота напряжения питания преобразователя.
При применении ТМУП следует учитывать сильное
влияние магнитной неоднородности материала вала на выходной сигнал ТМУП. Из-за
магнитной неоднородности материала вала выходной сигнал зависит от положения
вала. При вращении вала возникает дополнительная модуляция выходного сигнала.
Магнитная неоднородность материала вала приводит к появлению модулирующей
(мультипликативной) помехи, которая вызывает искажение полезного сигнала. При
этом выходное напряжение ТМУП имеет следующий вид:
Первые
три слагаемых этого выражения представляют неискажённую часть сигнала,
последующие слагаемые - искажённую часть сигнала, вызванную магнитной
неоднородностью материала вала. Анализ этого выражения показал, что спектр неискажённой части
сигнала перекрывается спектром искажённой части, поэтому они не могут быть
разделены с помощью фильтра. При обработке выходного сигнала ТМУП с помощью
полосового фильтра можно выделить только составляющую неискажённой части, ![]() характеризующую
среднее значение упора.
характеризующую
среднее значение упора.
Для измерения переменных составляющих упора
необходима установка нескольких преобразователей, симметрично расположенных по
окружности контролируемого вала.
В работе [3], указано что при ![]() , где
, где ![]() - число симметрично расположенных преобразователей,
- число симметрично расположенных преобразователей, ![]() искажённая часть сигнала равна нулю. Таким образом, установка
искажённая часть сигнала равна нулю. Таким образом, установка ![]() симметрично
расположенных преобразователей позволяет скомпенсировать гармонические
составляющие, вызванные магнитной неоднородностью материала вала, за
исключением гармоник кратных числу преобразователей: так при
симметрично
расположенных преобразователей позволяет скомпенсировать гармонические
составляющие, вызванные магнитной неоднородностью материала вала, за
исключением гармоник кратных числу преобразователей: так при ![]() =2 будут скомпенсированы все нечётные гармоники, при
=2 будут скомпенсированы все нечётные гармоники, при ![]() =4 – все нечётные и часть чётных, не кратных четырём и т.д.
Поэтому в кольцевом МУП, состоящим из нескольких симметрично расположенных ТМУП
выходной сигнал практически не зависит от магнитной неоднородности материала
вала. Однако использование кольцевых МУП технологически затруднено, поэтому был
разработан линейно-кольцевой МУП.
=4 – все нечётные и часть чётных, не кратных четырём и т.д.
Поэтому в кольцевом МУП, состоящим из нескольких симметрично расположенных ТМУП
выходной сигнал практически не зависит от магнитной неоднородности материала
вала. Однако использование кольцевых МУП технологически затруднено, поэтому был
разработан линейно-кольцевой МУП.
Линейно-кольцевой МУП (ЛКМУП) состоит из двух
секций симметрично расположенных по окружности вала, при этом каждая секция
состоит из нескольких ТМУП установленных вдоль линии вала и включенных между
собой последовательно. При этом уровень помеховой составляющей уменьшается в ![]() , где
N-общее количество ТМУП в датчике [6].
, где
N-общее количество ТМУП в датчике [6].
Помимо ЛКМУП можно использовать методы
комплексирования измеряемой величины[5], при которых одна и та же физическая
величина измеряется несколькими преобразователями, выходные сигналы которых
обрабатываются устройством обработки информации (УОИ) Рис. 1.
В простейшем
случае УОИ вырабатывает выходной сигнал, равный среднему арифметическому
значению сигналов измерительных преобразователей. Повышение точности измерения
физической величины происходит за счёт того, что дисперсия среднего
арифметического уменьшается пропорционально числу измерительных
преобразователей (ИП) по сравнению с дисперсией каждой составляющей.
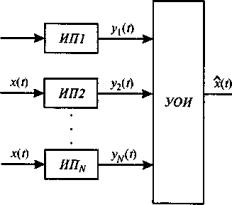
Рис. 1. Схема
комплексного измерительного устройства.
Комплексное измерительное устройство путём
введения избыточной информации позволяет производить усреднение погрешностей
при измерении физических величин, изменяющихся во времени. В целом КИУ,
содержащее ![]() измерительных преобразователей и устройство обработки
информации, можно рассматривать как один датчик, обладающий большей точностью и
надёжностью, чем отдельные измерительные преобразователи.
измерительных преобразователей и устройство обработки
информации, можно рассматривать как один датчик, обладающий большей точностью и
надёжностью, чем отдельные измерительные преобразователи.
В КИУ обработка сигналов с ИП может происходить
с помощью оптимальных и субоптимальных алгоритмов [5].
В КИУ с оптимальным линейным алгоритмом выходные
сигналы ![]() суммируются с
различными весовыми коэффициентами
суммируются с
различными весовыми коэффициентами ![]() ,
,![]() , образуя выходной сигнал
, образуя выходной сигнал ![]() .
.![]() При независимых погрешностях измерительных преобразователей
усреднение сигналов с весовыми коэффициентами приводит к снижению погрешности
КИУ по сравнению с погрешностью отдельного ИП. Выбор оптимальных значений
весовых коэффициентов
При независимых погрешностях измерительных преобразователей
усреднение сигналов с весовыми коэффициентами приводит к снижению погрешности
КИУ по сравнению с погрешностью отдельного ИП. Выбор оптимальных значений
весовых коэффициентов ![]() приводиться в
соответствии с критерием минимума математического ожидания квадратичной погрешности
приводиться в
соответствии с критерием минимума математического ожидания квадратичной погрешности
где: М- математическое ожидание.
Обработка сигналов ИП с помощью оптимального
линейного алгоритма в случае ненадёжных ИП может привести к существенным
ошибкам при отказе отдельных измерительных преобразователей.
Применение нелинейных оптимальных алгоритмов
позволяет значительно снизить погрешность при отказе части ИП. Оптимальный
нелинейный алгоритм определяется в соответствии с критерием
![]()
где: ![]() - оптимальная оценка сигнала
- оптимальная оценка сигнала ![]() , являющаяся функцией выходных сигналов ИП
, являющаяся функцией выходных сигналов ИП ![]() .
.
Реализация оптимальных алгоритмов обработки
сигналов ИП требует применения сложных вычислительных устройств. В ряде случаев
часто применяют субоптимальные (близкие к оптимальным) алгоритмы, не требующие
для своей реализации сложных вычислительных устройств. При этом снижается
точность обработки сигналов ИП с одновременным повышением надёжности. Из
субоптимальных алгоритмов широкое применение нашёл алгоритм выбора медианы.
Операция выбора среднего члена вариационного ряда носит название мажоритарного
преобразования. Поэтому можно записать:
![]()
При
совпадении большинства сигналов ИП вариационный ряд имеет следующий вид:
![]()
В этом случае
медиана совпадает с группой одинаковых сигналов, образуя сигнал большинства [5].
Таким образом, при наличии совпадающих между
собой сигналов ИП алгоритм выбора медианы реализует принцип «голосования». В
случае идеальных преобразователей, при исправном состоянии которых отсутствуют
погрешности, на выходе КИУ иметься сигнал, равный сигналу большинства. При
отказе некоторого числа ИП значение выходного сигнала не измениться. Так как
при N=3 измерительная система нечувствительна к
отказу одного ИП, при N=5 – к отказу двух ИП, при N=7- к отказу трёх ИП и т.д. Таким образом, алгоритм выбора
медианы позволяет создать надёжный датчик физической величины, в котором
сигналы отказавших ИП автоматически отключаются. Реальные ИП обладают
погрешностями, поэтому выходной сигнал КИУ определяется тем ИП, сигнал которого
совпадает с средним членом вариационного ряда. Но в этом случае сигнал
отказавшего ИП автоматически исключается.
Алгоритм выбора медианы выгодно использовать в
тех случаях, когда сведенья о погрешности измерительных преобразователей либо
отсутствуют, либо являются малодостоверными. Высокая эффективность оценки с
помощью алгоритма выбора медианы достигается благодаря его адаптивным
свойствам, когда резко ограничивается влияние появлений погрешностей высокого
уровня у части измерительных преобразователей.
На
рис. 2. показаны три непрерывные переменные, характеризующие
сигнал
ИП, а пунктирной линией показан сигнал полученный в результате мажоритарного
преобразования.
![]()
Рис. 2. Выбор медианы.
В рассматриваемом промежутке времени сигнал
одного из преобразователей имеет кратковременный выброс. Как видно из рисунка,
алгоритм выбора медианы позволяет устранить влияние выброса одного из ИП на
выходной сигнал.
В результате
можно отметить, что при разработке МУП и их внедрении на судах удалось
избавиться от нежелательного влияния магнитной неоднородности материала вала.
Разработаны и активно внедряются новые, перспективные магнитоупругие
преобразователи механических напряжений, в которых используются монолитные
магнитопроводы, гальваномагнитные элементы, эталонные чувствительные элементы с
высоким коэффициентом магнитоуругой чувствительности на основе аморфных сплавов
и нанострутктурированных материалах. По данной тематике получено более 25
авторских свидетельств и патентов на изобретение. По мнению авторов МУП могут найти
широкое применение не только в судовых системах, но также и и в
общепромышленных автоматических измерительных системах контроля механических
напряжений.
Литература:
1. Жадобин Н.Е., Магнитоупругие
преобразователи в судовой автоматике. Л.: Судостроение, 1985, 92 с.
2. Жадобин Н.Е. Динамические характеристики магнитоупругих
преобразователей. М.: в/о мортехинформреклама, 1988, 30 с.
3. Жадобин Н.Е., Крылов А.П., Малышев В.А. Элементы и функциональные устройства
судовой автоматики. С-Петербург.: Элмор, 1988, 438 с.
4. Жадобин Н.Е., Лебедев А.И. Магнитоупругие преобразователи в СЭУ //
Транспорт Российской Федерации – 2006. - № 6. – С. 36 -38.
5. Жадобин Н.Е., Лебедев А.И., Комплексирование при измерении магнитоупругими
преобразователями механических напряжений вращающихся валов. // Датчики и
системы. – 2008. - № 2. – С. 13 – 16.
6. Жадобин Н.Е., Лебедев А.И., Линейно-кольцевой магнитоупругий датчик
упора и продольных колебаний валопроводов. // Мехатроника, автоматизация,
управление. – 2008. -№ 4. – С. 6 – 8.
7. Коллокот Р. Диагностика
повреждений. М.: Мир, 1989, 180 с.