Технічні науки
/12. Автоматизованісистемиуправління на виробництві
Доцент, к. т.
н. Дегтяренко І.В, Косьяненко Л.Ф.
Донецький національний технічний університет, Україна
Дослідження режимів роботи та удосконалення
САУ роботи ліфта
Огляд об'єкту.
Сьогодні вже важко уявити собі українське місто без працюючого
вертикального транспорту. Для величезної кількості людей нормальна робота ліфтового
господарства є синонімом нормального
життя. Якісна робота ліфтів
і підйомних механізмів і їх надійність залишається одним з ключових аспектів у справі забезпечення безпеки житлових і громадських будівель, тому необхідний безперервний
розвиток і модернізація ліфтових систем управління.
Як об'єкт дослідження було взято ліфт
багатоповерхового будинку. Основними частинами ліфта є: лебідка, кабіна,
противага, направляючі для кабіни і противаги, двері шахти, обмежувач
швидкості, тягові канати і канат обмежувача швидкості, вузли та деталі приямка,
електрообладнання та електророзводка.
Кінематична схема ліфта представлена
на рис. 1.1. Ліфт має поліспастний підвіску з кратністю поліспаста 2, при якій
тягові канати 1, що сходять з канатоведущего шківа 2, огинає поліспастний блок
3 на кабіні 4 і противазі 5 і кріпляться до верхнього перекриття шахти в
машинному приміщенні.
Переміщення кабіни і противаги по напрямних здійснюється лебідкою 6, встановленої в машинному приміщенні, за допомогою тягових канатів 1. Там же розміщені обмежувачі швидкості, контролер, ввідний пристрій. Ліфт комплектується спеціалізованим контролером. [1]
Рис. 1 –Cхема ліфта
.
Постановка завдань дослідження.
Метою
даної роботи є поліпшення динамічних характеристик систему управління ліфтом в
перехідних режимах роботи і оцінка енергозатрат на управління.
Для
досягнення поставленої мети не обходимо сформулювати основні завдання роботи:
1. Розробити математичну модель
системи управління ліфтом на базі ПІД регулятора.
2. Синтезувати імітаційну модель
даної системи.
3. Дослідити динамічні характеристики
системи управління за допомогою математичної моделі.
4. Розробити модель, ща зможе в залежності від заданих параметрів
(відстані і маси) визначати оптимальну швидкість ліфта, що дозволить
забезпечити енергоефективність установки.
Моделювання вузла.
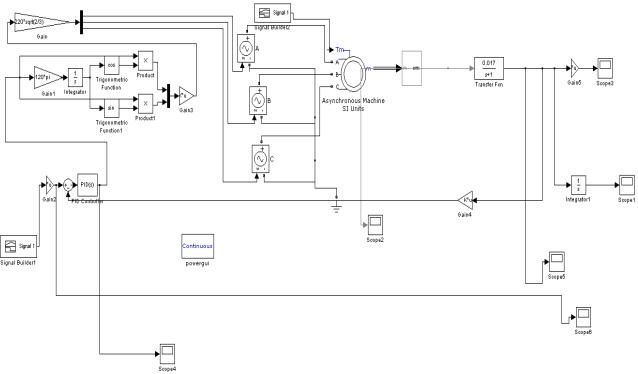 Рис. 2 – Імітаційна модель ліфта з контролем за швидкістю
Рис. 2 – Імітаційна модель ліфта з контролем за швидкістю
Для підтримки швидкості на потрібному
рівні виберемо ПІД [1] регулятор-найбільш ефективний і поширений вид
регулятора, що забезпечує досить високу точність при управлінні різними
процесами. Відомо, що даний регулятор слід вибирати для систем регулювання [2],
з відносно малим рівнем шумів і величиною запізнювання в об'єкті управління.
Таким чином, промоделювати систему, ми отримуємо необхідний результат, задана
швидкість 1м / с підтримується.
Результат отримано задовільний, але
підтримка одного й того ж значення скорості не залежно від параметрів не є
енергозберігаючим. Жорсткий перемикач, що буде працювати лише у залежності від
кількості людей у кабіні також не є задовільним. Для того щоб забезпечити
єнергоефективність треба враховувати кількість людей у кабіні пасажирського
ліфту (масу) та те на який поверх ідуть
пасажири. Тобто для вирішення
проблеми потрібно додати в модель фазіорегулятор, що дозолить врахувати всі
можливі випадки, за яких швидкість повинна змінюватись на більше чи менше
значення.
Для налаштування фазіорегулятора оберемо метод Мамдані [3] та опишемо правила, в загальному вигляді:
- If
(відстань маленьке і) and (маса маленька) then (швидкість середня)
- If
(відстань маленьке і) and (маса велика) then (швидкість мінімальна)
- If
(відстань велика і) and (маса маленька) then (швидкість максимальна)
- If
(відстань велика і) and (маса велика) then (швидкість середня)
Висновки
Була спроектована САУ процесу управління
переміщення кабіни ліфта. Було розглянуто процес роботи об'єкта, його
технологічна схема, а також мета проектування САУ. При моделюванні з
використанням ПІД регулятора ми добилися підтримки швидкості на необхідному рівні.
Ввівши в систему фазіорегулятор отримуємо інтелектуальне управління швидкістю,
що забезпечує зменшення застрат на електроенергію та забезпечення
комфортного перевезення пасажирів.
Список використаної літератури
1 Справочник
по электрическим машинам: В 2т./С74. Под общ. ред. Копылова И.П. и Клонова Б.К.
Т.1.-М.: Энергоатомиздат, 1988. 456 с., ил.
2 Лазарев Ю. Моделирование процессов и
систем в MATLAB. Учебный курс. - СПб.: Питер; Киев: Издательская группа BHV,
2005. 512 с.: ил.
3 Леоненков А. В. Нечеткое моделирование в
среде MATLAB fuzzyTECH. ––
СПб.:БХВПетербурr, 2005. –– 736 с.: ил.