Технічні науки /12. Автоматизовані системи
управління на виробництві
Донецький національний технічний
університет, Україна
Дослідження режимів
роботи та удосконалення САУ водонапірного вузла Мушкетівський м. Донецьк
Завданням водопостачання є безперебійне постачання якісної води
споживачам за умови здійснення найбільшої зручності користування водою, при
найменшій її вартості і заданої надійності експлуатації системи водопостачання.
У данiй роботi постає задача розробки нової та більш ефективної САУ
водопостачання Мушкетівського
водонапірного вузла.
Розглянемо
Мушкетівський водонапірний вузол як об'єкт управління.
Вузол розташований
в Будьонівському районі, по вул. Волховстроя, 3а на території шахти
«Мушкетівська-Вертикальна». Введено в експлуатацію в 1978 р. Проектна
продуктивність 240 тис. м3/добу.,
Фактична продуктивність 60 - 68 тис. м3/добу., Відмітка поверхні
землі на території вузла 200 м.
Водопровідний вузол подає воду споживачам
Калінінського, Будьонівського, Пролетарського та східній частині Ленінського
району.
На території
вузла розташовані:
– резервуари
чистої води з камерами перемикань (баки-накопичувачі) обсягом 10000 м3
- 3 шт .;
– насосна
станція: насоси Д 2000-100 - 4 шт. (продуктивність 2000 м3/год,
напір 100 м вод. ст.), автоматичний перетворювач частоти обертання насоса
потужністю 800 кВт;
– допоміжні
будівлі і технологічні комунікації.
Задані
параметри системи:
– Qвх
- швидкість надходження води в баки, 1300 м3/год;
– Qmax
- споживання води на місяць, 465 000 м3;
– Pтруб
- вихідний тиск в трубопроводі до споживачів, 560 кПа;
– dтруб
- 400 мм.
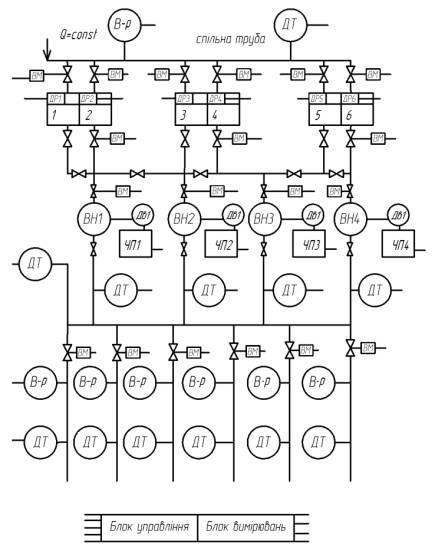
Рис. 1 – Технологічна схема Мушкетiвського водонапiрного вузла
На
рисунку 1.2 позначено: В-р –
витратомір, ДТ – датчик тиску, ВМ – виконавчий механізм, ЧП – частотний
перетворювач, ВН – відцентровий насос, Дв – двигун, ДР – датчик рівню.
Для моделювання контролю тиску в трубопроводі
зберемо у пакетi Simulink Matlab наступну модель:
Рис. 2 – Модель в Simulink
(підтримка тиску)
Модель реалiзує
лише одну трубу з насосом. На рисунку 1 маємо 4 насоси, 1 з яких знаходиться у
режимi гарячого резерву [1] .
Управлiння включенням/вiдключенням
насосiв здійснюється за
допомогою оператора. Наша задача звільнити його вiд
цiєї працi.
Для цього було розроблено фазi
регулятор, який автоматично контролює кiлькiсть
працюючих насосiв. У пакетi Simulink Matlab
такий регулятор вже реалiзовано у бiблiотецi Fuzzy Logic Toolbox. Для нього складемо
низку
правил
[2] :
IF(тиск низький)AND(споживання низьке)THEN(насос 1 вкл.) (насос 2 вiдк) (насос 3
вiдк)
IF(тиск середнiй)AND(споживання середнє)THEN(насос 1 вкл.) (насос 2 вкл) (насос 3
вiдк)
IF(тиск високий)AND(споживання високе)THEN(насос 1 вкл.) (насос 2 вкл) (насос 3
вкл)
Висновки: Таким чином
розроблений фазi регулятор дозволив
значно збiльшити ефективнiсть
САУ водонапiрного вузла, зменшити
навантаження на оператора i найголовнiше
– підвищити енергоефективнiсть, тому що тепер
максимальна кiлькiсть
насосiв працює лише тодi,
коли споживання води найбiльш високе.
Литература:
1. Лобачев П. В. Насосы и
насосные станции. М.: Стройиздат. 1990.
2. Леоненков А. В. Нечеткое моделирование в
среде MATLAB и fuzzyTECH. –– СПб.:БХВ Петербурr, 2005.