Технические науки/4.
Транспорт
Д.т.н. Дианов В.Н.
Московский
государственный индустриальный университет, Россия
К.ф.м.-н. Гевондян Т.А.
Пензенский
артиллерийский инженерный институт, Россия
Повышение достоверности
функционального контроля парктроника
В последнее время вследствие резкого увеличения
автомобильного транспорта обострилась задача парковки автомобилей. Актуальной
является задача увеличения срока службы парковочной системы, и как следствие,
узлов и блоков автомобиля, а также снижения отказов и сбоев в работе
парковочной системы. Существующие технические решения имеют существенный
недостаток - низкую достоверность обнаружения источников сбоев в
данной системе парктроника, невозможность обнаружения скрытых дефектов в
контактных дорожках, линиях связи с внешними устройствами, а также
соединителях, обеспечивающих подключение указанных устройств и, как следствие,
надежность аппаратуры оказывается невысокой. Ранее известное устройство для сигнализации
неисправности контролируемого объекта, в котором результат достигался за счет
введения в каждом канале модуля автоматического контроля неисправности датчика,
решало задачу за счет усложнения схемы датчика [1]. Недостатком такого
устройства является его функциональная ограниченность вследствие невозможности
учета скрытых дефектов из-за вибраций, температурных воздействий,
электромагнитных помех и других причин.
Поэтому актуальной
является задача расширения функциональных возможностей парковочной системы, в
частности, за счет повышения надежности аппаратуры посредством обнаружением
скрытых дефектов (предвестников сбоев)
в линиях связи элементов за счет введения датчиков сбоев с соответствующей обработкой информации (сигналов)
[2].
На рисунке 1
изображена блок-схема модернизированной парковочной системы.
251658240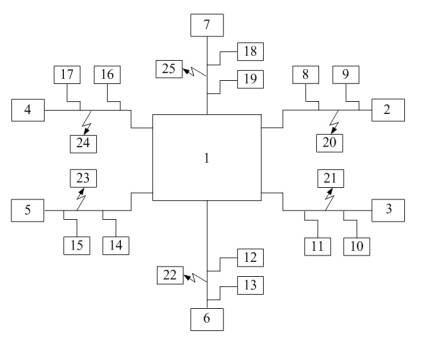
Рис. 1. Блок-схема парковочной
системы повышенной надежности
Парковочная
система содержит электронный блок управления 1, блок ультразвуковых датчиков и
датчиков слепой зоны переднего контура 2, блок ультразвуковых датчиков и
датчиков слепой зоны заднего контура 3, правый предупреждающий светодиод 4,
левый предупреждающий светодиод 5, индикатор 6, блок питания 7, а также контактные
датчики сбоев (КДС) 8 - 19, бесконтактные датчики сбоев (БДС) 20 – 25.
Задача
повышения достоверности функционального контроля и, как следствие, надежности
работы парктроника решается тем, что аппаратура дополнительно содержит КДС и
БДС, позволяющие регистрировать амплитудно-частотные характеристики источников
сбоев и повышенное электромагнитное излучение в диапазоне частот от 0 до единиц
ГГц. В качестве информативных признаков при обнаружении скрытых дефектов
используют повышенное электромагнитное излучение, эффект дифференцируемости и
интегрируемости сигналов [3]. Система выполнена с возможностью мажорирования
сигналов с нечетного числа БДС, с возможностью определения источников
внутренних помех.
Данная схема
содержит по 2 датчика КДС на каждую линию связи, число КДС может быть и
большим. БДС устанавливают в
непосредственной близости (единицы сантиметров) от тестируемых элементов или
узлов. Количество таких датчиков выбирается, исходя из их чувствительности,
протяженности линий связи и также может быть большим.
Параллельно
с работой узлов и блоков 1 – 7 в режиме «он-лайн» работают КДС и БДС.
Микроминиатюрное исполнение датчиков, их небольшие массогабаритные показатели,
дешевизна при изготовлении не представляют затруднений при их внедрении.
КДС реализованы на КМОП-инверторах и
микроемкостях (сотые доли пикофарад), а БДС реализованы на пассивных (L, C - элементах) микрорезонансных
контурах.
Отметим, что при срабатывании двух и более КДС в
качестве источника сбоя определяется узел или элемент с более ранним по времени
срабатыванием датчика. При срабатывании двух и более БДС, расположенных вблизи
различных линий связи, в качестве источника сбоя определяется внешнее
электромагнитное воздействие (помеха).
Скрытые дефекты как причины сбоев элементов и
узлов на начальной стадии своего развития регистрируются контактными датчиками
КМОП-структуры по дифференциальному информативному признаку, а скрытые дефекты
элементов и узлов на конечной стадии своего развития (перед отказом, например,
обрывом линии связи) регистрируются контактными датчиками (например,
микроемкостями) по интегральному информативному признаку. Дополнение схемы
дифференциальными и интегральными датчиками сбоев позволяет повысить
информативность системы, в частности, при определении запаса живучести или
остаточного ресурса.
Литература:
1.
Патент
РФ №2278414. МПК G08 B 23/00 от 20.06.2006.
2.
Дианов
В.Н., Гевондян Т.А., Люминарская Е.С., Белоусов И.М., Баядин М.В. Устройство
обнаружения источников сбоев в системе защиты транспортных средств. Патент РФ
на полезную модель № 114919, 2012. Бюл.№11.
3.
Дианов
В.Н. Интегро-дифференциальная кодо-импульсная модуляция в задачах диагностики
скрытых дефектов сложных объектов. International
Scientific – Practical conference “Innovative information technologies”, Prague
– 2012. April 23 – 27, pp.403 – 405.