Еренчинов Данияр Кагазбекович, АО «ДАСУ»
г.Алматы
Разработка математической модели
автоматического регулирования давления дисков с идеальным регулятором при
обработке пробок шарового крана.
Все более широкое применение на трубопроводах
находят шаровые краны, которые обладают всеми основными преимуществами
конических кранов и имеют преимущества перед коническими: пробка и корпус крана
благодаря сферической форме имеют меньшие размеры и массу, а также большую
прочность и жесткость и обеспечивают гораздо лучшую герметичность. В шаровых
кранах не нужны ребра жесткости, усложняющие технологию отливки и увеличивающие
массу своего устройства.
Относительная технологическая сложность
получения необходимого качества и низкая производительность традиционных
методов обусловили необходимость разработки нового метода и устройства финишной
обработки запорной поверхности сферических пробок шаровых кранов в торовых
желобах между прижимаемыми друг к другу дисками.
Важным параметром является давление создаваемое пневмосистемой
на верхний вращающийся диск и соответственно на пробки оказывающее существенное
влияние на качество изделия и производительность обработки. Поэтому
необходимость стабилизации давления привело к поиску и исследованию адекватной
структуры регулятора расхода воздуха полуавтомата Д7.
В данной работе приводится случай , когда динамика – объекта описывается
уравнением первого порядка, а регулятор – идеальный.
В
общем случае автоматическая система регулирования давления дисков состоит из
объекта - пневмоцилиндра и регулятора расхода воздуха (рисунок.1).
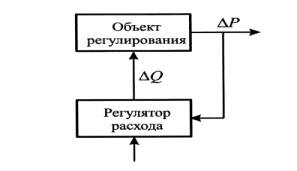
Рисунок 1. Структурная схема объекта с
регулятором
Уравнение
регулируемого объекта имеет вид [1]:
![]() , (1)
, (1)
где Т0
- постоянная времени объекта;
![]() - приращение
давления;
- приращение
давления;
![]() - приращение расхода воздуха;
- приращение расхода воздуха;
К0
- коэффициент усиления объекта;
f(t) -
внешнее возмущающее воздействие.
Уравнение
идеального регулятора расхода будет
![]() , (2)
, (2)
где ![]() - коэффициент усиления
регулятора.
- коэффициент усиления
регулятора.
Требуется
найти процесс регулирования ![]() р(t) при
любом значении возмущаемого воздействия f(t).
р(t) при
любом значении возмущаемого воздействия f(t).
Путем исключения не интересующей нас
промежуточной переменной ![]() найдем единое уравнение всей
системы автоматического регулирования в целом, а именно: подставив
найдем единое уравнение всей
системы автоматического регулирования в целом, а именно: подставив ![]() из (2) в уравнение
(1), получим
из (2) в уравнение
(1), получим
![]()
И
перенесем член с ![]() р влево, тогда
уравнение динамики системы регулирования в целом будет
р влево, тогда
уравнение динамики системы регулирования в целом будет
![]() (3)
(3)
Путем решения этого уравнения
можно определять процесс регулирования ![]() при любом внешнем
воздействии
при любом внешнем
воздействии ![]() , возникающем как
результат изменения нагрузки при обработке изделия.
, возникающем как
результат изменения нагрузки при обработке изделия.
Процесс
регулирования ![]() складывается из двух частей: переходного процесса
складывается из двух частей: переходного процесса ![]() и установившегося процесса
и установившегося процесса ![]() :
:
Математически переходной процесс
определяется общим решением однородного уравнения (при ![]() =0):
=0):
![]() , (4)
, (4)
а установившийся процесс - частным
решением неоднородного уравнения (3) при заданной правой части ![]() .
.
С точки зрения теоретической механики
переходной процесс есть свободное движение системы, а установившийся процесс -
вынужденное движение. С точки зрения теории колебаний первое есть собственное
колебание, а второе - вынужденное колебание.
Разберем по отдельности переходной и
установившийся процессы в системе с идеальным регулятором.
В
данном случае характеристическое уравнение для (4) имеет вид
![]()
Корень
его имеет вид
и, следовательно, переходной процесс,
как решение однородного уравнения (4), будет экспонентой
![]() (5)
(5)
где ![]() - произвольная постоянная, определяемая из
заданных начальных условий процесса; в данном случае она
равна начальному значению величины
- произвольная постоянная, определяемая из
заданных начальных условий процесса; в данном случае она
равна начальному значению величины ![]() :
:
![]() =
= ![]() при t = 0.
(6)
при t = 0.
(6)
Кривая
переходного процесса (5) для положительного значения ![]() показана на рисунке 2
показана на рисунке 2
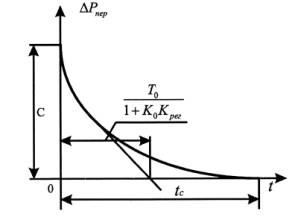
Рисунок
2. Кривая переходного процесса объекта с регулятором
Оценим характер переходного процесса в
системе с идеальным регулятором по сравнению с переходным процессом в том же
объекте без регулятора. Последний в данном случае представляет
собой объект, в котором расход не регулируется, следовательно, объект описывается
уравнением при ![]() , т.е.
, т.е.
![]() (7)
(7)
Рассуждая тем же путем, найдем
переходный процесс в объекте без регулятора
![]() ,
(8)
,
(8)
где ![]() при
при ![]() = 0.
= 0.
Кривая
этого переходного процесса показана на рисунке 3.
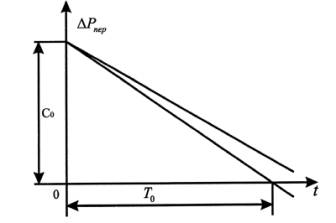
Рисунок
3. Кривая переходного процесса объекта без регулятора
Из
сравнений рисунков 2 и 3 видим, что в системе с регулятором переходный процесс
затухает значительно быстрее, чем в объекте без регулятора, так как
Следовательно, присоединение идеального
регулятора уменьшает постоянную времени (рисунок 2) в ![]() раз, т.е. сильно уменьшает инерционность объекта
(рисунок 3), придает объекту новые
динамические качества. Выбором коэффициента усиления регулятора
раз, т.е. сильно уменьшает инерционность объекта
(рисунок 3), придает объекту новые
динамические качества. Выбором коэффициента усиления регулятора ![]() можно по желанию менять степень инерционности
системы.
можно по желанию менять степень инерционности
системы.
Длительность переходного процесса tc (рисунке
2), которая для экспоненты принимаемого равной приблизительно трем
постоянным времени, для системы автоматического регулирования первого порядка
с идеальным регулятором будет
![]() (9)
(9)
Установившийся процесс в системе
регулирования зависит от конкретной формы возмущающегося воздействия
![]() , т.е. он зависит от
характера изменения нагрузки и может быть произвольным.
, т.е. он зависит от
характера изменения нагрузки и может быть произвольным.
Рассмотрим
случай мгновенного скачкообразного воздействия (рисунок 4)
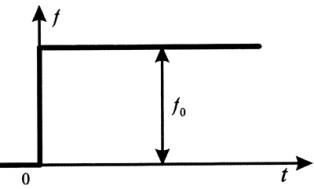
Рисунок
4. Скачкообразное изменение внешнего возмущающегося воздействия
Установившийся
процесс при этом находится как частное решение уравнения (3) при f(t)
= const = f°:
Следовательно, объект в
новом установившемся состоянии будет иметь постоянное по
величине отклонение по давлению, оно называется статическим отклонением, т.е.
![]() , (10)
, (10)
где
величина ![]() представляет собой систематическое отклонение
давления в объекте без регулятора (при
представляет собой систематическое отклонение
давления в объекте без регулятора (при ![]() Q =
0) вследствие изменения нагрузки.
Q =
0) вследствие изменения нагрузки.
Поэтому формула (10)
показывает, что присоединение к объекту регулятора уменьшает статическое
отклонение давления в ![]() раз.
раз.
Наибольшая систематическая ошибка
будет иметь место при наибольшем значении ![]() , чтобы ее уменьшить, надо брать по возможности больше
коэффициент усиления регулятора.
, чтобы ее уменьшить, надо брать по возможности больше
коэффициент усиления регулятора.
Итак, процесс регулирования ![]() в случае мгновенного
присоединения
в случае мгновенного
присоединения ![]() в соответствии с формулами (5) и (10) будет
в соответствии с формулами (5) и (10) будет
Предположим, что до момента t=0 система была в
нормальном установившемся состоянии и при t = 0 было ![]() р = 0.
р = 0.
Написанное выше уравнение при этих данных дает
![]() откуда
откуда ![]()
При
этом условии процесс регулирования запишется в виде
![]() (11)
(11)
В объекте без регулятора при тех же условиях согласно
уравнению (11) и ![]() Q
= 0
процесс изменения давления будет
Q
= 0
процесс изменения давления будет
Оба процесса изображены на рисунке 5
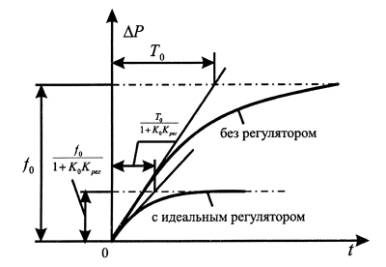
Рисунок
5. Переходные процессы объекта с регулятором и без него
Выводы:
1.
Разработана
теория автоматического регулирования давления в процессе обработки изделия,
рассмотрен и исследован объект с идеальным регулятором.
Литература
1.
Солодовников В.В. Основы автоматического регулирования.
М.: Физматгиз, 1999, 420с.
2.
Попов Е.П. Динамика систем автоматического регулирования. М.: Наука, 2002, -240с.