УДК 539.3
СВОБОДНЫЕ И ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ БАЛКИ
ТИМОШЕНКО
С. Абдурахманов, ТашГТУ,
Ж.С Еркишева, М . Д. Кошанова, МКТУ им. Ясави
С
увеличением размеров и скоростей современных машин в инженерных расчетах
становится все более важным решение задач, связанных с колебаниями. Хорошо
известно, что только на основе теории колебаний могут быть полностью выяснены
такие практически важные проблемы, как уравновешивание машин, крутильные колебания
валов и зубчатых передач, колебания турбинных лопаток и турбинных дисков,
колебания рельсового пути и мостов под действием движущихся грузов, колебания
фундаментов. Лишь при помощи этой теории можно установить наиболее удачные
пропорции конструкций летательных аппаратов.
В
работах [1,2] рассматривались динамические задачи упругих балок с учетом
инерции вращения и поперечного сдвига. Однако применяемые материалы в настоящее
время в технике в той или иной мере характеризуется вязкими свойствами, в связи с чем упругая аппроксимация свойств
материала не всегда допустима.
В
настоящей работе рассматриваются задачи о свободном и вынужденном колебания
вязкоупругой балки Тимошенко с учетом поперечного сдвига и инерции вращения.
При реальном учета физико-механической свойств материала строится математическая
модель оставленной задачи. Математической моделью поставленной задачи является
интегро-дифференциальное уравнение в частных производных с соответствующими
начальными и граничными условиями. Полученные интегро-дифференциальное
уравнение в частных производных с помощью метода Бубнова-Галеркина сводится к
решению систем обыкновенных интегро-дифференциальных уравнений с переменными
коэффициентами относительно функции времени. Интегрирование уравнений было
проведено численным методом, предложенном в работах [3] На основе этого метода
разработаны алгоритмы численного решения задач о колебаниях и динамической
устойчивости вязкоупругой балки с учетом сдвига и инерции вращения.
Рассмотрим
поперечные колебания вязкоупругой балки, основанной на модели С.П. Тимошенко
[1, 2]. Физическое соотношение между напряжениями ![]() и деформациями
и деформациями ![]() примем в виде
примем в виде
![]()
где, ![]() -
модуль упругости;
-
модуль упругости; ![]() -
интегральный оператор с ядром релаксации
-
интегральный оператор с ядром релаксации ![]()

Обозначим
через ![]() угол наклона кривой прогибов, а через
угол наклона кривой прогибов, а через ![]() угол поперечного сдвига. Тогда связь между
ними аналогично [75, 109] описывается уравнением
угол поперечного сдвига. Тогда связь между
ними аналогично [75, 109] описывается уравнением
Связь
между деформацией ![]() и углом поворота
и углом поворота ![]() запишем в виде:
запишем в виде:
Тогда для изгибающего момента
М и поперечной силы Q будем иметь выражения

(1)
где l-коэффициент, зависящий от формы поперечного сечения
балки; F площадь поперечного сечения G-модуль
сдвига; J-момент инерции.
Подставляя (1) в уравнения.

получим

(2)

Где r -плотность
материала балки.
Пусть стержень имеет начальный прогиб ![]() ,
Тогда уравнение (2) с учетом начальных прогибов имеет вид:
,
Тогда уравнение (2) с учетом начальных прогибов имеет вид:

(3)

Введем
безразмерные параметры: ![]()
![]()
![]() где,
где, ![]() - частота основного тона колебаний шарнирно
опертого упругого стержня.
- частота основного тона колебаний шарнирно
опертого упругого стержня. ![]() - радиус инерции
сечение.
- радиус инерции
сечение.
Решение
систем интегро-дифференциальных уравнений полученные выше при различных
граничных условиях и при наличии слабо сингулярных ядер наследственности
представляет значительные математические трудности. Поэтому естественным
способом решения этих систем является
дискретизация по пространственным переменным и получение систем обыкновенных
интегро-дифференциальных уравнений относительно искомых функций времени. В настоящей
работе получен систем обыкновенных интегро-дифференциальных уравнений применен
методом Бубнова-Галеркина. Переходя к безразмерным параметрам и проводя
несложные математические преобразование получим:
 (5)
(5)
В
[3] для решение систем интегро-дифференциальных уравнений предложен численный
метод, основанный на использовании квадратурных формул. Этот метод
распространим для систем вида (5)
Пологая
![]() i = 1,2,
..
i = 1,2,
..![]() . и земеняя
интегралы некоторымы квадратурными формулами, для вычисления значений
. и земеняя
интегралы некоторымы квадратурными формулами, для вычисления значений ![]()
![]()
получим
следующие систему линейных алгебраических уравнений.
где![]() -числовые коэффициенты, принимающие различные значения в
зависимости от использованных квадратурных формул.Полученная систем решается
методом Гаусса. р
-числовые коэффициенты, принимающие различные значения в
зависимости от использованных квадратурных формул.Полученная систем решается
методом Гаусса. р
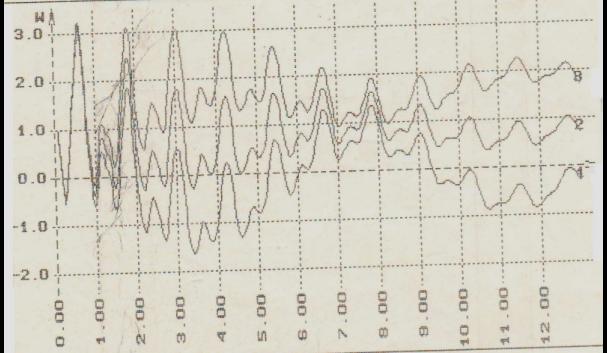
На
рисунке представлен график колебании балки с учетом инерции вращения и сдвига
(кривая 1) только инерции вращения
(кривая 2) без учета инерции вращения и сдвига (кривая 3)
|
|
Литература
- Тимошенко С.П., Янг Д.Х., Уивер У. Колебания в
инженерном деле. М. Машиностроение. 1985, 472 с.
- Тимошенко С.П. Курс теории упругости. Киев,
Наукова думка, 1972, 501 с.
- Бадалов Ф.Б. Методы решения интегральных и
интегро-дифференциальных уравнений наследственной теории вязкоупругости.
Ташкент, Мехнат, 1987 г., 269 с.