Технические науки/3 Отраслевое машиностроение
к.т.н. Шотиков А.В.
Харьковский национальный технический университет сельского хозяйства имени П.Василенко
ПОСТРОЕНИЕ КАРТ ОБЗОРНОСТИ МОБИЛЬНОЙ ТЕХНИКИ ПО ПАНОРАМНЫМ
ФОТОИЗОБРАЖЕНИЯМ СПЕЦИАЛЬНОГО ВИДА
Оценку параметров обзорности мобильной техники на стадии испытаний целесообразно выполнять, используя стерео-панорамные фотокамеры [1]. Учитывая, что такие фотоаппараты не получили широкого распространения и сегодня не выпускаются, то появляется необходимость доработки обычных фотокамер путем снабжения их специальными отражающими или преломляющими световые лучи насадками.
Наиболее простой
конструкцией является зеркальный шар, который следует установить перед
объективом соосно оптической оси. В этом случае такая насадка изменяет
направление лучей, что позволяет получать круговые панорамные изображения на
плоскости с большими вертикальными углами зрения [1]. В
этой работе предложен
также геометрический аппарат получения панорамного изображения на плоскости
негатива.
Целью настоящей работы является разработка способа получения круговой карты обзорности испытываемой машины по панорамному фотоснимку, произведенному с точки обзора.
В связи с тем,
что изображение на плоскости негатива располагается внутри кольца [2], то для установления аналитической зависимости между положением точки на
изображении и ее проекций на плоскости стояния машины целесообразно
использовать полярную систему координат. В этом случае достаточно установить
аналитические зависимости между радиусами-векторов точек на плоскостях Λ и
Γ одного луча, так как угол радиуса-вектора является инвариантом
преобразования.
На рис.1
изображен геометрический аппарат преобразования изображения ![]() точки А, расположенной на плоскости
точки А, расположенной на плоскости ![]() , в ее проекцию
, в ее проекцию ![]() на плоскость стояния
машины, который включает:
на плоскость стояния
машины, который включает:
![]() - зеркальную
отражающую поверхность с центром в точке обзора О;
- зеркальную
отражающую поверхность с центром в точке обзора О;
![]() - центр
проецирования, который соответствует задней узловой точке объектива
фотографической камеры;
- центр
проецирования, который соответствует задней узловой точке объектива
фотографической камеры;
О – точку обзора, совпадающую с центром сферы;
![]() - картинную плоскость, совпадающую с плоскостью негатива;
- картинную плоскость, совпадающую с плоскостью негатива;
Г –
плоскость стояния транспортного средства;
![]() - изображение точки А
на плоскости
- изображение точки А
на плоскости ![]() ;
;
![]() - проекцию точки А
на плоскости Г.
- проекцию точки А
на плоскости Г.
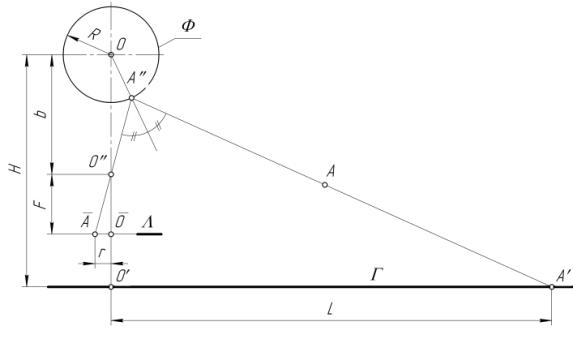
Рис. 1.
Процесс преобразования точки ![]() плоскости
плоскости ![]() в проекцию
в проекцию ![]() плоскости Г заключается
в следующем. Луч
плоскости Г заключается
в следующем. Луч ![]()
![]() , проходящий через центр проецирования
, проходящий через центр проецирования ![]() , попадает на зеркальную поверхность Ф в точку
, попадает на зеркальную поверхность Ф в точку ![]() и, отразившись от
нее, пересекает плоскость Г в точке
и, отразившись от
нее, пересекает плоскость Г в точке ![]() . При этом угол падения луча
. При этом угол падения луча ![]()
![]() на зеркальную
поверхность равняется углу отражения, что позволяет установить аналитическую
зависимость между радиусом-вектором r точки на плоскости
на зеркальную
поверхность равняется углу отражения, что позволяет установить аналитическую
зависимость между радиусом-вектором r точки на плоскости ![]() и радиусом-вектором L - на плоскости Г.
и радиусом-вектором L - на плоскости Г.
Примем следующие обозначения:
H - расстояние от точки обзора О до плоскости Г;
R
– радиус
зеркальной сферы;
r
- радиус-вектор
точки на плоскости ![]() ;
;
b - удаление от центра О
сферы Ф до задней узловой точки
объектива ![]() ;
;
F – фокусное расстояние
объектива камеры;
L – удаление точки ![]() (радиус-вектор) от проекции
точки О' обзора О на плоскости Г.
(радиус-вектор) от проекции
точки О' обзора О на плоскости Г.
Формула L=f(r) имеет
вид
(1)
где ![]() .
.
Анализ представленной зависимости (1) показывает, что для практической работы ее можно упростить, при этом погрешность вычислений не превысит 1 – 1,5%.
Упрощенная формула имеет вид
 .
(2)
.
(2)
Литература
1.
Шотиков А.В., Шебанова В.И. Оценка параметров обзорности с/х тракторов и машин на стадии
испытаний// Материали за V международна научна
практична конференция «Найновите научни постижения-2009» т.24 Технология. София
«Бял ГРАД-БГ» ООД, 2009.
2. Шотиков
А.В. Геометрический аппарат для
получения панорамних изображений на плоскости// Materialy V Mezinarodni Vedesko-Prakticka Konference “Nauka i Inowacja – 2009”,V. 13.Technizne nauki, Przemysl: Nauka i studia, 2009.