Современные
инфомационные технологии/2. Вычислительная техника и программирование
Pavlo
Bazilinskyy
Mikkeli
University of Applied Sciences, Finland
Implementing
Hough transformation with C language of programming
The Hough
transformation is a technique, which is used to detect and isolate objects of a
predefined shape within an input image. The classical realisation of the Hough
transformation requires defining types of shapes to be processed on input. The
most commonly used utilisation of this tool is detection of lines or circles in
a give image [6]. The Hough transform as it is mostly known today was
introduced by Richard Duda and Peter Hart in 1972, they called their technique
a "generalized Hough transform" [7].
This
article takes a case of finding straight lines in the given image into account.
In order to find a line on the image a set of discrete points that come out
from such filtering algorithm as edge detection must be plotted into a line
segment. The equation for a line is y = ax + b and it can be plotted for each pair
of points (x, y) on the image. As stated by McAullife (Year not give), a task
of the Hough transformation is to find find the slope parameter a and the
intercept parameter b for each line and then output the line. However, the slope approaches infinity as
the line becomes more vertical. This issue can be resolved if a parametric
equation is used:
x *cos(theta) +
y*sin(theta) = rho
where, rho is the length of a normal from the origin to
the line and theta is the orientation of the line with
respect to the X axis.
After (rho;
theta) values are found for each point in the image the Hough space can be
drawn. On the received graph points with the biggest concentrations of plotted
dots indicate lines in the image.
Figure 1. (a) a straight line
in the original coordinates described in terms of the length of a normal from
the origin to the line - r and orientation theta; (b) the Hough plane where
points A, B, and C are transformed into three sinusoidal curves [7].
The Hough
transformation can be relatively easily implemented using such common languages
of programming as C, C++ or Java [4]. In the scope of this article working with
this technique in C language of programming is described. The algorithm that
can be used to implement the Hough transformation can be outlined:
1.
Populate an array with (rho; theta) values.
2.
Detect number of lines.
3.
Draw Hough space.
4.
Draw lines based on the Hough space.
Firstly, a
function for performing detecting lines houghTransformation() can be created. Extensive research was done on
usage of matrixes with CUDA to store theta/rho values, but better results were
achieved in handling 1d arrays on GPU level [1, 2]. To achieve that the
accumulator array should be utilized in which “votes” are given for each point
in the image that is given on input. The following approach can be used to
populate a 1-dimensional array with (rho; theta) values for each point in the
inputted image: votes are put into an accumulator array, where index i is calculated: i = rho + (theta * NUM), where NUM is a predefined value, that is always larger than a maximum value for rho. Hence, rho = i % NUM and theta = i / NUM.
Then, drawLine() function can be written that draws a line for
a given theta/rho value. To draw a line on the image, (x;y) coordinates can be
calculated using this formula to find y for each x: y = (rho - x*cos(theta)) / sin(theta).
The next
step is to draw the Hough space of dimensions [Max value of rho; 180], where
180 is the max value for theta.


Figure 2. Hough Space with 4 lines detected
(brightness increased).
Aforementioned
approach works fine for detecting one line object. However, a problem of
detecting and drawing multiple lines can also considered. To detect multiple
lines a radius around high numbers of votes in the accumulator array, which
indicates a detected line, can be defined; then the array can be looped
backwards, calling drawLine() function for each detected line.
This
problems requires complex calculations and thus should be solved using parallel
computing. The tool used for writing this article was CUDA library from NVIDIA
Corporation. This library allows programmers to utilize C and C++ languages of
programming to perform complex parallel calculations [1, 3]. All CUDA functions
that are used in examples in this article have <<<width,
height>>> dimensions, which are determined on a stage, when an input
image is loaded. It allows running width * height (dimensions
of the image) number of threads to be run simultaneously, which results in
satisfying performance.

Figure 3. Detection of 2 lines using the Hough
transformation.
A final
output of the programme is a window with an original image and images, which
show transformation that the input image undertakes to come to a final result,
that is used in the Hough transformation function. Then, the original image
with detected lines drawn on top of it is presented along with the Hough space.
Listings of
functions used for the Hough transformation using C language of programming:
houghTransformation():
//
==============================================
// CUDA
function that calculates rho and theta values for
// detecting
lines using Hough transformation algorithm for given values of
// (x;y). It
uses an equation rho = x*cos(theta) + y*sin(theta), where x and y are
// coordinates
of a pixel on the image. Rho is the length of a normal from the
// origin
to the line, theta is the orientation
of the line with respect to the X
// axis. Line
detection needs to output results into a 2d space[rho][theta].
// Parameters: unsigned char *in - pointer to the array with transformed
// image
// int *out - pointer to the array for
storing
//
histogram values
// int n_pixels - number of pixels multiplied by
// sizeOf(int)
// Returns: nothing
//
==============================================
__global__ void
houghTransformation(unsigned char *in, int *out, int n_pixels, int width, int
height) {
int
thread_id = (blockIdx.x * blockDim.x) + (threadIdx.x);
int
thetaDeg;
float rho;
if
(thread_id < n_pixels) {
if
(in[thread_id] > 0) {
//Checking
the colour. If it is more than zero then it is not black.
int
y = thread_id / width;
int
x = thread_id - (width * y);
for
(thetaDeg = 0; thetaDeg < 180; ++thetaDeg) {
//Iterate through theta
float thetaRad = dev_degrees_to_radians(thetaDeg); // degrees
into radians conversion
rho = x * cosf(thetaRad)
+ y * sinf(thetaRad);
out[rho
+ (thetaDeg * NUM)]++;//Increment a value in an accumulator array
}
}
}
}
drawLine():
//
==============================================
// Function
that draws the Hough space using *space.
// Parameters: int *histogram - array with theta(Y), rho(X) values.
// float rho - value of rho used.
// float theta - value of theta used.
// unsigned char
*lineImage - array to hold generated
// image.
// int width - width of the image.
// int height - height of the image.
// Returns: nothing
//
==============================================
void
drawLine(int *histogram, float rho, float theta, unsigned char *lineImage, int
width, int height) {
int x, y;
for(x = 0; x < width; x++){
y = (int) (rho - x * cosf(theta)) /
sinf(theta);
set_pixel(lineImage, x, y, 178, 34,
34, 255, width, height);
}
}
To test the
programme images custom images were used along with real photos. These factors
affecting results were found: dark lines are harder to detect; solid background
is required for better results; if the line is not clear enough the line is
detected more than once.
To perform
testing different images were used as input and 7 different values for
<<<width, height>>> were given, as can be seen from the
graphs below along with a control test on CPU level.
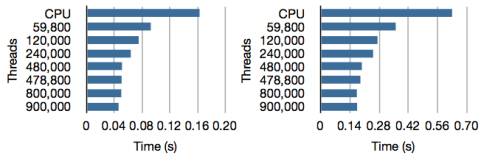

Figure 4. Timing data for images with 1 pencil
(left) and 4 pencils (right).
It is clear from testing performed that after
certain point increasing number of threads does not affect performance with a
linear dependancy. It is, therefore, important to calculate threshold for the
optimum number of threads for the best performance and cost efficiency [5].
Literature:
1. NVIDIA Corporation. CUDA C Programming Guide. Nvidia Corporation
- 2011. Referred 25.1.2011. Available in www-format:
<http://developer.nvidia.com/nvidia-gpu-computing-documentation>.
2. NVIDIA Corporation. CUDA C Best Practices Guide. Nvidia
Corporation - 2011. Referred 25.1.2011. Available in www-format: <URL:
http://developer.nvidia.com/nvidia-gpu-computing-documentation>.
3. NVIDIA Corporation. CUDA C Getting Started Guide for Linux.
Nvidia Corporation - 2011. Referred 25.1.2011. Available in www-format:
<URL: http://developer.nvidia.com/nvidia-gpu-computing-documentation>.
4. Kim King. C Programming: A Modern Approach.
2nd ed. W. W. Norton & Company - 2008.
5. Stephen Keckler, William Dally, Brucek Khailany,
Michael Gerland, David Glasco. GPUs and the Future of Parallel Computing. Nvidia. Computing Now
November, p. 1 - 2011
6. Matthew McAullife. Hough Transform, Imaging Sciences Laboratory.
Year not given. Referred 26.1.2011. Available in www-format: <URL:
http://mipav.cit.nih.gov/documentation/HTML%20Algorithms/HoughTransform.html>
7. Richard Duda and Peter Hart. Use of the Hough Transformation to Detect
Lines and Curves in Pictures. Comm. ACM, Vol. 15, pp. 11–15 - January, 1972