д.т.н.,
профессор. Пиль Э.А., Санкт-Петербургский государственный морской
технический университет
аспирант. Морозов К.Н., Санкт-Петербургский государственный морской технический университет
Россия
ПРИМЕНЕНИЕ ТЕОРИИ ГРАФОВ ПРИ ОПИСАНИИ
КОНСТРУКЦИИ домкрата-динамометра
Домкрат-динамометр
представляет собой автоматическую подъемную машину с возможностью контроля
нагрузки, приложенной к опоре и контроля положения штока. Общий вид домкрата-динамометра
представлен на рисунке (Ошибка!
Источник ссылки не найден.).
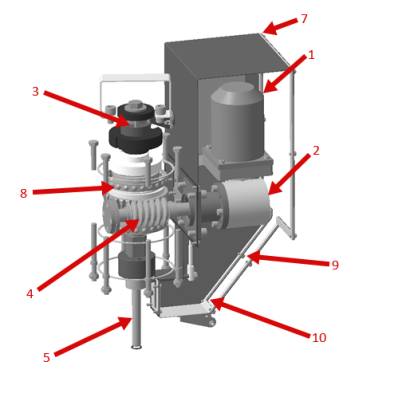
Рисунок 1 –
Устройство домкрата-динамометра (1 – двигатель; 2 – редуктор; 3 – датчик силы; 4 – червячная передача
гайка-шток; 5 – шток; 7 – корпус домкрата; 8 – зубчатое колесо; 9 – датчик
положения; 10 – рычаг привода датчика положения от штока)
Итак, устройство
домкрата-динамометра (ДД) можно представить как совокупность следующих
отдельных узлов: электрических (ЭЛ), электромеханических (ЭЛМ) и механических (МУЗ),
а также отдельных деталей (ОД) (1)
ДД = {ЭЛ1…ЭЛi, ЭЛМ1…ЭЛМj, МУЗ1…МУЗn, ОД1…ОДg}. (1)
Электрические
узлы, в нашем случае это электродвигатель, представляет собой совокупность
стационарных (СТЧ) и вращающихся (ВРЧ) частей (2)
ЭЛi = {СТЧ1…СТЧd, ВРЧ1…ВРЧj}. (2)
К
стационарным частям двигателя относятся: статор (СТ), (обмотка возбуждения
(ОВ), корпус (КР) щетки (ЩТ) (если применяется коллекторный двигатель) и др. (3)
СТЧd = {СТ, КР,
ЩТ…ЩТ,…}. (3)
К вращающимся
частям двигателя относятся: ротор (РТ), вал (ВЛ), коллектор (КЛ) и подшипники
(ПДШ, (4)
ВРЧj = {РТ, ВЛ, КЛ,
ПДШ1…ПДШ2}. (4)
К
электромеханическим (ЭЛМ) узлам относятся датчик силы (ДС) и датчик положения
(ДП) (5)
ЭЛМ = {ДС, ДП}. (5)
Датчик силы
(ДС) состоит из следующих четырех частей: чувствительный элемент (ЧЭ), подложка
(ПД), выводы (ВВ) и защитная пленка (ЗП) (6)
ДС = {ЧЭ, ПД,
ВВ, ЗП}. (6)
Датчик
положения (ДП) состоит из цельного стального вала с полностью интегрированной
шкалой (ЦСВ) и подвижного модуля считывающей головки (ПМСГ), в котором нет
внутренних движущихся деталей, что придаёт всей системе высокую
сопротивляемость ударам и вибрациям (7)
ДП = {ЦСВ,
ПМСГ}. (7)
К
механическим узлам (МУЗ) относится только один редуктор (РД) (8)
МУЗ = {РД}. (8)
Редуктор (РД)
состоит из корпуса (КР), валов (ВЛ), зубчатых колес (ЗК) и шпонок (ШП) (9)
РД = {КР, ВЛ,
ЗК, ШП1…ШПn}. (9)
Отдельные
детали (Д) состоят из совокупности червячной передачи (ЧП), состоящей из
следующих деталей: червяк (ЧВ), гайка (ГК) и шток (ШТ) (10)
Д = {ЧП, ГК,
ШТ}. (10)
Таким образом,
описанную выше конструкцию домкрата-динамометра
(ДД) можно представить в виде графа, где
вершинами графа являются различные электрические (ЭЛ), электромеханические
(ЭЛМ) и механические узлы (МУЗ), а также отдельных деталей (ОД), а ветвями их характеристики, что и представлено
на рисунке ниже.
Следовательно,
изменяя характеристики ветвей графа мы, таким образом, изменяем характеристики домкрата-динамометра, которые необходимы для
конкретного случая.