Мокретченко
Л.В., к.ф.-м.н., доц. Гусев А.Ю.
Национальный
горный университет, Украина
Повышение
точности определения основных параметров интегрированной навигационной системы
связи
В настоящее
время общепризнано, что одним из основных путей совершенствования
навигационного оборудования является создание комплексных навигационных систем
связи предполагающих структурное и параметрическое интегрирование спутниковых и инерциальных навигационных систем,
что позволяет, сохранив в полной мере их достоинства, устранить многие
недостатки.
Задача
комплексной обработки информации в интегрированной навигационной системе связи
(ИНСС) заключается в построении таких алгоритмов, с помощью которых
обеспечивается максимальная точность определения основных навигационных параметров
– координат, скорости и углов ориентации.
Для обобщенной
структуры ИНСС, представленной на рисунке, предлагается субоптимальный метод
калмановской фильтрации, позволяющий в реальном времени получить оценку
параметров состояния ИНСС.
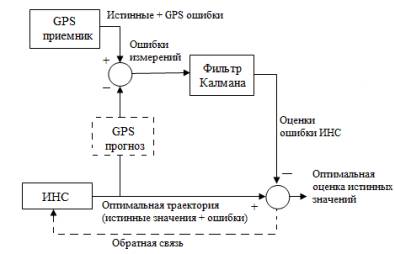
Рисунок
- Обобщенная структура интегрированной навигационной системы связи
Суть
метода заключается в
оценивании вектора параметров состояния системы, причем вектор измерений
фильтра рассматривается в виде многомерного выходного сигнала системы, а вектор
состояния — неизвестный многомерный сигнал, подлежащий определению. Условием
оптимальности построенной оценки состояния является минимум ее
среднеквадратической ошибки.
Для
случая дискретных измерений сигнала Sn,
представляющего собой аддитивную смесь:
![]() (1)
(1)
где ![]() - полезный сигнал,
- полезный сигнал, ![]() - аддитивный шум с математическим ожиданием
- аддитивный шум с математическим ожиданием ![]() и дисперсией R,
уравнения фильтра Калмана могут быть записаны в виде:
и дисперсией R,
уравнения фильтра Калмана могут быть записаны в виде:
![]()
![]() (2)
(2)
![]()
где ![]() - оценка сигнала при n отсчете,
- оценка сигнала при n отсчете, ![]() – матрица перехода состояний n-1 к n отсчету,
– матрица перехода состояний n-1 к n отсчету,
![]() - матрица условий измерения,
- матрица условий измерения, ![]() - матрица ошибок.
- матрица ошибок.
Предлагаемая
модификация фильтра Калмана заключается
в следующем. Известно, что сигнал произвольной формы можно представить в виде
разложения в ряд, например, ряд Тейлора. Ограничившись членами не выше m
порядка, для каждого элемента матрицы Ф размерности
![]() можем записать:
можем записать:
 (3)
(3)
Известные
из теории фильтров причины расходимости (смещенности оценок), связанные в
основном в нашем случае с конечным значением m, требуют контроля расходимости.
Для этих целей предлагается процедура, которая сводится к подсчету статистики
вида:
 (4)
(4)

на интервале [n-M, n]. Определенные на этом интервале величины ![]() и
и ![]() сравниваются с порогом h. При превышении значения h одной из величин принимается
решение о расходимости, параметрам фильтра присваиваются начальные значения, а
фильтрация продолжается с момента n-M.
сравниваются с порогом h. При превышении значения h одной из величин принимается
решение о расходимости, параметрам фильтра присваиваются начальные значения, а
фильтрация продолжается с момента n-M.
Таким
образом, сочетание спутниковой и инерциальной навигационных систем совместно с
фильтром Калмана позволяет повысить точность навигационных определений,
поскольку располагая характеристиками инструментальных ошибок обеих систем,
фильтр Калмана сводит к минимуму их влияние на выходные навигационные данные. Кроме
того, предложенная модификация фильтра учитывает наличие нелинейных моделей,
связывающих переменные состояния системы с измерениями и друг с другом.