Современные технологии и
устройства оптимизации терминальной деятельности.
Мамонтов Иван Юрьевич, аспирант
Московского Государственного Университета Путей Сообщения (МГУПС-МИИТ) по
специальности 05.22.08 «Управление процессами перевозок» кафедры «Логистические транспортные системы и
технологии», специалист 1 категории
сектора организации продаж услуг по перевозкам с участием Белоруссии, Украины и
Германии ОАО «ТрансКонтейнер».
Modern technologies and devices of
optimization of terminal activity.
Mamontov Ivan, the post-graduate student of the Moscow State
University of Railway Engineering (MGUPS-MIIT) on a speciality 05.22.08 "Management
of processes of transportations» of chair «Logistical transport systems and
technologies», the specialist of Sales Department Belarus, Ukraine and Germany
JSC «TransContainer».
Ключевые
слова: бизнес-процессы,
мобильные терминалы сбора данных, RF-ID технологии, непрерывная обработка контейнеров,
транспортирование контейнеров по схеме
«консоль-консоль», многоуровневый терминал, роботизированные тележки для
перемещения контейнеров.
Main words: business
processes, mobile
terminals of data gathering, RF-ID technologies, continuous processing of
containers,
transportation
of containers under the scheme "the console-console", the multilevel
terminal, the robotized carts for moving of containers.
Аннотация:
В настоящее время российские контейнерные терминалы
находятся на этапе автоматизации и интеллектуализации
терминально-складской деятельности, создания современных информационных
системам, которые позволят моделировать процесс грузопереработки и
перемещения контейнеров на территории данных терминальных комплексов в режиме
реального времени.
Это особенно актуально в связи с принятой
в нашей стране программой внедрения современных технологий и создания
интеллектуальных центров.
На крупнейших терминалах Западной Европы, таких как
Роттердам, Гамбург, Антверпен, Дуйсбург, в настоящий момент уже внедрены многие
новейшие технические устройства, которые описаны в данной статье.
В России не наблюдается повсеместного внедрения новых
технологий и технических средств для
обработки контейнеров. Порою это приводит к существенным проблемам. В
данной статье приведены примеры
современных технических средств и инженерных решений, которые могут быть
успешно внедрены на контейнерных терминалах Российской Федерации.
The summary:
Nowdays the Russian container
terminals are at a stage of automation and intellectualization of
terminalno-warehouse activity, creation modern information systems which will allow to model
process of movings of containers in
territory of the terminal complexes in a mode of real time.
It is especially actual in
connection with the program of introduction of modern technologies which accepted
in our country.
On the largest terminals of
the Western Europe, such as Rotterdam, Hamburg, Antwerp, Duisburg, are already introduced many newest technical
devices which are described in given article.
In Russia it is not observed
universal introduction of new technologies and means for processing of
containers. At times it leads to vital issues. In given article examples of
modern means and engineering decisions which can be successfully introduced on
container terminals of the Russian Federation are resulted.
Современные технологии и
устройства оптимизации терминальной деятельности (текст статьи).
В современных условиях транспортно-экспедиторская компания может
добиться преимущества на рынке контейнерных перевозок не только оптимизацией
логистических цепей поставок грузов, но и путём совершенствования терминальной
деятельности.
Согласно «Терминологии
комбинированных перевозок», изданной Секретариатом Организации Объединенных
Наций в 2001 году:
«Терминал
– это место, оборудованное для хранения и обработки интермодальных транспортных
единиц».
В
этом же документе указано: «Интермодальные транспортные единицы – это контейнеры, съемные кузова и полуприцепы, пригодные для интермодальной
перевозки».
Необходимо отметить, что ранее в работах Э.С.Поддавашкина, А.П.Кузнецова,
В.Н.Панферова, В.М.Николашина, Н.Е.Лысенко и Л.Б.Миротина высказывалось
мнение о трех направлениях в изменении
информационных технологий в области грузовых перевозок. По мнению выше
названных авторов, первое направление характеризуется интеллектуализацией
инфраструктуры; второе направление - внедрением мероприятий по
интеллектуализации подвижного состава; и третье направление
предполагает интеллектуализацию грузовых отправок.
Автор предполагает, что на данный момент целесообразно говорить о
четвёртом направлении в развитии информационных технологий в области грузовой и
коммерческой работы. Это направление предполагает автоматизацию и
интеллектуализацию терминально-складской деятельности, создание современных
мультимодальных терминалов, оснащенных информационными системами, которые
позволяют моделировать процесс грузопереработки и перемещения грузов на
территории данных терминальных комплексов.
Условно любой контейнерный терминал
можно разделить на следующие
подсистемы:
- контора приёмосдатчиков контейнерной
площадки и товарная контора;
- зона работы автомобильного транспорта;
- зона работы железнодорожного транспорта;
- зона работы морского транспорта (если
рассматривается морской контейнерный терминал);
- погрузочно-разгрузочные механизмы;
Далее в тексте статьи для каждой из
выделенных подсистем предложены эффективные технологические решения,
способствующие повышению конкурентоспособности контейнерного терминала.
Рассмотрим некоторые инновационные технологические решения и
новейшие устройства, которые могут быть применены на российских терминалах для
совершенствования их работы.
С целью оптимизации работы приемосдатчиков и товарных кассиров контейнерных
терминалов предлагается использовать
автоматизированную систему управления контейнерным терминалом CTMS (ConsID Transport Management System).
CTMS обеспечивает
управление работой перегрузочной техники, транспорта и персонала, а также
контроль перемещения контейнеров, оперативное планирование заданий персоналу с
учётом текущей обстановки.
Все операции под управлением автоматизированной
системы управления контейнерным терминалом выполняются с использованием мобильных терминалов сбора данных (МТСД). Результат выполнения любой операции
заносится в CTMS и ТСД. При этом на контейнерном терминале должна быть
развёрнута радиосеть (WiFi) или на контейнерном терминале может быть
задействована RF-ID технология (метод автоматической идентификации объектов, в
котором посредством радиосигналов считываются или записываются данные,
хранящиеся в так называемых транспондерах, или RFID-метках) для идентификации
контейнеров при выполнении операций с ними. Однако во втором случае каждый
контейнер при приёме должен быть снабжён радиометкой.
В составе комплексного решения управления контейнерным
терминалом используется высококачественное радиооборудование производства
компании Motorola. При этом системные
требования, предъявляемые к CTMS, следующие.
Рекомендуемая конфигурация для установки для работы в системе не более 25
пользователей:
- Сервер базы данных – Dual Xeon (2-х ядерный), 4 GB RAM;
- Сервер приложения и терминалов сбора данных - тот же.
Для больших нагрузок на систему имеется возможность
масштабирования системы, то есть
разнесения модулей системы на разные сервера: базу данных и приложения.
Решение CTMS поддерживает следующие основные функции:
1)
Ведение справочников
системы: справочника контейнеров, справочника грузов, справочника владельцев
контейнеров, справочника контрагентов, справочника погрузочной техники.
2)
Управление пространством контейнерной площадки.
Зонирование контейнерной
площадки.
3)
Управление операциями с
контейнерами: выгрузкой, погрузкой, досмотром, взвешиванием, ремонтом.
4)
Управление стратегиями
перемещения контейнера на контейнерном терминале.
5)
Управление группировкой
контейнеров в штабели по различным критериям.
6)
Управление работой
перегрузочной техники.
7)
Управление обработкой
транспорта: автомобильного и железнодорожного.
8)
Формирование
производственной отчётности.
Кроме того, CTMS поддерживает ряд существенных дополнительных функций. Так, по
согласованию с заказчиком, в рамках проекта автоматизации контейнерного
терминала, могут быть также автоматизированы операции управления работой
автомобильного и железнодорожного транспорта на территории контейнерного
терминала.
Управление работой
автомобильного транспорта на контейнерном терминале позволяет ускорить обработку прибывших и отгруженных контейнеров,
минимизировать простои автотранспорта.
Функции системы управления работой автомобильного транспорта
следующие:
1)
контроль въезда автотранспорта
на транспортно-распределительный
терминал (ТРТ); открытие пропуска.
2)
Печать пропуска на въезд
(с указанием маршрута).
3)
Описание (проверка) прибывших контейнеров.
При проверке контейнера в CTMS систему заносится
информация: номер контейнера; состояние
годный или дефектный; статус загруженности: гружёный или порожний; дата
постройки; класс опасности груза.
4)
Изменение состояний
транспорта в зависимости от стадии его обработки.
5)
Управление
погрузкой-разгрузкой автотранспорта.
6)
Регистрация выезда
автотранспорта, закрытие пропуска.
Модуль управления работой железнодорожного транспорта
на контейнерном терминале позволяет ускорить обработку прибывших по железной
дороге или отгруженных на железнодорожный подвижной состав контейнеров.
Функции модуля следующие:
1)
Контроль прибытия
подвижного состава на железнодорожные пути.
2)
Описание прибывших
вагонов: номер, тип, собственник, признак годности.
3)
Описание (проверка)
контейнеров на вагоне.
4)
Изменение состояний
вагона в зависимости от стадии его обработки.
5)
Формирование комплектов
вагонов на отгрузку: по направлению, собственнику подвижного состава,
суммарному весу контейнеров.
6)
Управление погрузкой –
выгрузкой контейнеров на вагоны.
7)
Регистрация ухода
вагонов с ТРТ.
Для оптимизации управления работой ричстакеров
(погрузчиков типа «KALMAR») могут быть применены RF-ID технологии
(ранее в тексте статьи приводилось описание данной технологии). При этом RF-ID метки размещаются на контейнер при приходе контейнера
и снимаются при уходе. Так же следует установить RF-ID считыватель на ричстакер. RF-ID считыватель
устанавливается на один из захватов ричстакеров. RF-ID метка
крепится на контейнер на боковую стенку. От RF-ID считывателя
она должна быть на расстоянии 60-80 сантиметров. Использование RF-ID идентификации
даёт увеличение скорости ввода информации при выборе заданий обработки
контейнера и избавляет оператора от ручного ввода при работе.
Бизнес-процессы
системы CTMS.
Приёмка
контейнеров.
Заявка на приёмку контейнеров автоматически загружается
из корпоративной информационной системы (или вводится вручную).
При приходе
автотранспорта (или железнодорожного состава) с контейнерами оператору системы
управления контейнерным терминалом (диспетчеру) передаётся товарно-транспортная
накладная на контейнеры (или железнодорожная накладная). Диспетчер системы CТMS находит нужную заявку и описывает пришедшие
контейнеры, вводя в систему номер контейнера,
владельца контейнера, год постройки контейнера, вес нетто контейнера,
предельную грузоподъёмность, статус заполненности контейнера, номера пломб,
номер транспортного средства (или вагона).
После окончания описания прихода контейнера системой
автоматически формируется задание на приёмку контейнера и на хранение на ТРТ.
Приёмосдатчик с ручным МТСД выполняет приёмку контейнеров
при въезде на ТРТ. После подтверждения
приёмки приёмосдатчиком системой автоматически формируется задание на
размещение контейнера в определенный район контейнерной площадки, которое далее
выполняется водителем ричстакера.
После выполнения заданий приёмки контейнеров,
диспетчер переводит статус заявки в состояние «Выполнена». После перехода
заявки в состояние «Выполнена» система обмена электронными документами
формирует подтверждение приёмки. После подтверждения приёмки контейнеров может
быть распечатан пакет документов (товарно-транспортная накладная, акт приёмки,
акт технического осмотра и др.).
Размещение
контейнеров после приёмки в CTMS.
Размещение выполняется, как процесс, отдельный от
процесса приёмки. Однако данный процесс может отсутствовать, если приёмка
происходит непосредственно на адреса хранения в штабели
(в иностранной литературе также используется термин «сток»).
Существует два метода размещения поступивших на ТРТ
контейнеров:
1)
Экспертное размещение.
Приёмосдатчик, ответственный за приёмку, выбирает адрес для размещения,
основываясь на технологии работы контейнерной площадки и собственном опыте.
2)
Размещение с
использованием указаний системы. Водитель ричстакера (или приёмосдатчик),
оснащённый МТСД, запрашивает указание системы по
функциональной клавише. На экран МТСД выводится
оптимальный для размещения адрес. Факт размещения подтверждается функциональной
клавишей.
Логика размещения может быть настроена через алгоритмы размещения (перемещения). Эти алгоритмы могут быть настроены в
зависимости от бизнес-процессов ТРТ. Алгоритмы в режиме реального времени
позволяют оптимально находить адрес для контейнера при всех операциях
перемещения контейнера на терминале. При этом критерии поиска оптимальных мест
могут быть различными.
На данный момент в системе при размещении
отслеживаются следующие критерии:
- груженый/порожний;
- номер
контейнера;
- статус контейнера: подлежит или не подлежит
таможенному оформлению;
- дефектный или исправный;
- необходимость подключения/отключения оборудования для
рефрижераторных контейнеров;
- оптимальный адрес на контейнерной площадке на основе
приоритетов;
- поиск адреса в незаполненном районе контейнерной
площадки, где уже хранятся контейнеры со схожими характеристиками;
Основным преимуществом применения алгоритмов
размещения является гибкость при определении и изменении стратегии управления
размещением контейнеров на контейнерном терминале.
Резервирование
контейнеров под заявки. Формирование заданий на выемку контейнеров из
штабеля под погрузку.
Оператор системы управления контейнерным терминалом
принимает решение о начале подготовки контейнеров к погрузке. Диспетчер заходит
в меню приложения «неразмещённые заявки», находит заявки и инициирует процесс
формирования заданий выемки контейнеров из штабелей для подготовки погрузки на
транспортное средство. Заявки, отправленные в подбор, изменяют свой статус на
«размещён».
Перемещение
контейнеров на терминале.
Алгоритмы перемещения позволяют оптимизировать поиск
адреса для перемещения контейнеров с адреса на адрес на ТРТ.
Алгоритмы перемещения могут быть построены:
- в разрезе владельцев (закрепление адресов за
конкретным владельцем);
- в разрезе зон (выделение зон обработки контейнеров:
зоны приёмки, ремонта, досмотра и др.);
- в разрезе типоразмеров контейнеров (закрепление
адресов под конкретный размер
контейнеров);
- в разрезе статуса загруженности контейнера
(выделение зон для хранения порожних и гружёных контейнеров);
- с учётом даты и направления ожидаемой отгрузки;
- через буферные зоны (возможность организации
многошаговых перемещений контейнеров на площадке).
Управление
последовательностью перемещения контейнеров.
При группировке контейнеров в стеки контейнеры
помещаются в определённой последовательности, которая соответствует техническим
нормам по выполнению данного размещения разными типами техники. При изъятии
контейнеров из штабеля выемка производится также в определённой
последовательности. Для этого в системе выполняется настройка приоритетности
помещения контейнеров в штабель и изъятия контейнеров из него. Это позволяет
уменьшить непродуктивное перемещение, то есть выемку контейнеров из штабеля для достижения необходимого целевого
контейнера.
Выемка
контейнеров под отгрузку.
После получения водителем ричстакера задания на выемку
контейнеров под отгрузку, заявка изменяет статус на «в отборе». Водитель
ричстакера выполняет выемку контейнеров
из штабеля в соответствии с заданиями, получаемыми с МТСД.
Погрузка
контейнеров на транспортные средства. Подтверждение отгрузки.
Начало погрузки контейнеров на транспортное средство
по заявке определяет диспетчер ТРТ по приходу транспортного средства и наличию
ресурсов.
Ответственный за погрузку водитель ричстакера (или
приёмосдатчик) фиксирует факт погрузки, подтверждая его при помощи МТСД. После
погрузки контейнеров на транспортное средство, диспетчер ТРТ проверяет
правильность выполнения погрузки. Факт ухода транспортных средств с
контейнерами фиксируется ответственным приёмосдатчиком с МТСД или диспетчером системы. При этом статус каждой отгруженной
заявки изменяется на «отгружена».
Предлагаемая система CTMS (ConsID Transport Management System) обладает
следующими преимуществами по сравнению с АСУ КП(Автоматизированная система
управления контейнерной площадкой):
- ускорение оборота контейнеров на терминале за счёт
оптимизации мест хранения;
- ускорение оборота контейнеров на терминале без
увеличения количества персонала;
- позволяет уменьшить непродуктивное перемещение
контейнеров для достижения необходимого
целевого контейнера (при помощи настройки приоритетности изъятия контейнеров);
- возможность оперативного контроля за работой
терминала;
- управление работой погрузо-разгрузочной техники в
режиме реального времени посредством выдачи системой заданий на мобильные
терминалы сбора данных (МТСД).
Итак, выше было сделано предложение по
совершенствованию работы приемосдатчиков и товарных кассиров контейнерного
терминала, а также предложена модель управления работой погрузо-разгрузочных
механизмов в режиме реального времени.
Теперь стоит подробнее остановиться на технологических
решениях, которые могут быть внедрены для оптимизации работы тех зон контейнерных
терминалов, которые связаны с работой автомобильного, железнодорожного и
морского транспорта.
Так, инженер А.М.Кузовков предложил включить
контейнерный терминал в технологический процесс работы сортировочной горки
припортовой станции.
Прибывшие суда-контейнеровозы обслуживаются береговыми
консольными перегружателями, которые перемещают контейнеры на два конвейера –
береговой и основной продольный. Данные
конвейеры расположены параллельно железнодорожным путям парка прибытия и
осуществляют перемещение контейнеров между контейнерной площадкой и береговыми
консольными перегружателями.
Основной продольный конвейер также обеспечивает
доставку контейнеров в погрузо-разгрузочный цех с поперечными конвейерами,
число которых равно числу одновременно обслуживаемых железнодорожных вагонов.
В местах стыков продольных и поперечных конвейеров
установлены специальные механизмы для изменения направления движения
контейнеров.
А.М.Кузовков предложил также посты идентификации и
осмотра контейнеров и подвижного состава. Они должны быть расположены
соответственно над конвейерами перед контейнерной площадкой и в районе
сортировочной горки. При прохождении контейнеров через посты идентификации
происходит автоматическое считывание их номеров, проверка состояния корпуса контейнера,
а для таможенных целей может быть осуществлено и просвечивание содержимого
контейнеров.
Для непосредственной перегрузки контейнера с железнодорожного вагона на судно (или
обратно), минуя конвейерную цепочку, предназначен специальный путь, расположенный
параллельно парку прибытия в районе
работы одного из береговых консольных перегружателей.
Рассмотрим подробнее принцип передачи контейнера с
продольного конвейера на поперечный. Для этого предложено поперечные конвейеры
расположить несколько выше продольных.
Под продольным конвейером в местах передачи
расположены специальные подъёмные механизмы. Конструкция механизма позволяет
его колёсам свободно проходить между роликами продольной секции.
Контейнер, предназначенный для передачи, поступает по
продольному конвейеру и останавливается над подъёмным механизмом. Затем
конвейер поднимается на уровень поперечного конвейера. Вращением колёс
подъёмный механизм передаёт груз крайней секции поперечного конвейера.
В погрузо-разгрузочном цеху платформы с контейнерами
обслуживаются расположенными на колоннах мостовыми кранами, которые перемещают
контейнеры с платформ на поперечные конвейеры.
Техническое решение, предложенное инженером А.М.
Кузовковым, позволяет осуществлять одновременную работу как минимум трёх
систем:
1)
системы обслуживания
судов-контейнеровозов
2)
сортировочной горки
припортовой станции, работающей с крупнотоннажными контейнерами
3)
контейнерного терминала
Стоит отметить, что в мировой практике также известен
подобный проект.
Так, китайская компания Shanghai Zhenhua Port Machinery Co Ltd (ZPMC), которая является лидером по
производству автоматических складирующих кранов, разработала макет масштабного контейнерного терминала,
позволяющего транспортировать блок из двух контейнеров по всей технологической
цепочке от судна-контейнеровоза до контейнерного терминала на специальных
рельсовых тележках.
При этом железнодорожные тележки движутся
перпендикулярно причалам, обеспечивая технологическую связь морского фронта со
складом.
А складские автоматические краны обслуживают эти
тележки с контейнерами в любой точке штабеля (рис.1).
Далее рассмотрим новое технологическое решение для
перемещения контейнеров между морским грузовым фронтом и контейнерным
терминалом, реализованное на терминале RST в Роттердаме
(Нидерданды).
Особенность данного решения заключается в том, что
блоки по 9 контейнеров формируются на специальной тележке, оснащенным
автоматизированным канатным приводом для передвижения этой тележки из-под
консоли причального перегружателя под консоль складского грузового крана и обратно (рис.2).
Однако тележки передвигаются только перпендикулярно
причалу, что уменьшает скорость выполнения грузовых операций с контейнерами.
При этом автоматизация операций в технологических
зонах терминала является одной из важнейших задач для создания современных
терминалов,
обеспечивающих значительные объёмы переработки
контейнеров и связывающих воедино такие технологические системы, как морской
транспорт, контейнерный терминал и автомобильный транспорт.
Следовательно, необходимо совершенствовать не только
погрузо-разгрузочные и иные механизмы, работающие на контейнерном терминале и в
морском порту, но и технологию работы данных систем.
Среди инженерных решений, направленных на
совершенствование горизонтальной транспортировки контейнеров между
операционными зонами терминала, следует отметить роботизированные тележки AGV (Automated Guided Vehicle).
Первые AGV применялись
на бакалейных складах и автомобильных сборочных конвейерах, а со временем
роботизированные тележки стали применяться и на контейнерных терминалах.
При этом AGV
двигались или по специальным рельсам, или
по направлениям, задаваемым лазерными
лучами, или вдоль проложенных под поверхностью терминала индукционных кабелей.
Затем появились роботизированные тележки с произвольными маршрутами, которые
двигаются, подчиняясь сигналам центральной информационно-управляющей системы и
командам комплекса вспомогательных бортовых систем.
Наиболее широкое применение тележки AGV нашли в морских портах. Однако очевидно, что их
использование также эффективно и на территории масштабных контейнерных
терминалов.
Совершенствование устройства роботизированных тележек AGV
продолжается. В рамках проекта IPSI TM (Improved Port Ship Interface, усовершенствованный интерфейс порт-судно)
разработано устройство IPSI AGV, оснащенное кассетами, на которые устанавливаются
один или несколько контейнеров.
Эти системы предназначены для обработки судов как с
вертикальной (ло-ло), так и горизонтальной (ро-ро) погрузкой.
Платформа IPSI AGV имеет
два рабочих положения: низкое и высокое. Первое из них используется тогда,
когда IPSI AGV не
несет никакого груза. В этом положении IPSI AGV может
въезжать под кассету, чтобы поднять её.
При перемещении с кассетой IPSI AGV находится в
верхнем рабочем положении.
Для управления перемещением IPSI AGV используются
вращающиеся лазеры на обеих сторонах тележки. Система специальных отражателей,
расположенных на терминале, позволяет им постоянно корректировать своё
положение в пространстве.
Сканеры на торцах IPSI AGV
предназначены для предотвращения столкновений и работе внутри ро-ро судов.
В настоящее время имеется два типа IPSI AGV,
различающихся скоростью и грузоподъёмностью. Первые их них имеют
грузоподъёмность 84 тонны и скорость 20 км/час независимо от загрузки. Вторые,
более поздние версии, имеют максимальную скорость 45 км/час без груза и 30
км/час с грузом 66 тонн.
При движении с грузом 55 тонн они могут перемещаться
со скоростью 40 км/час.
Основная идея использования IPSI AGV заключается
в сокращении
числа единиц техники при увеличении производительности
погрузки-разгрузки. Современные IPSI AGV могут двигаться в четыре раза быстрее AGV, используемых в порту Роттердама.
Вывод по
статье: На крупнейших терминалах
Западной Европы, таких как Роттердам, Гамбург, Антверпен, Дуйсбург, в настоящий
момент уже внедрены многие новейшие технические устройства, описанные в данной
статье. Например, роботизированные тележки AGV (Automated Guided Vehicle) для внутритерминального перемещения контейнеров.
В России не наблюдается повсеместного внедрения новых
технологий и технических средств для
обработки контейнеров. Порою это приводит к существенным проблемам. Так,
в последнее время на контейнерном терминале Кунцево-2 имел место случай, когда
прибывший танк-контейнер с грузом оказался заблокирован на контейнерной
площадке из-за поломки козлового крана.
Танк-контейнер был поставлен непосредственно рядом со
складом временного хранения. Единственно возможным способом его перемещения
являлась работа сломанного козлового крана.
Следует заметить, что, если бы на терминале Кунцево-2
были предусмотрены тележки AGV для
перемещения контейнеров, проблема с изоляцией данного танк-контейнера была бы
решена значительно раньше.
Это лишь единичный пример необходимости оснащения
российских контейнерных терминалов современными техническими устройствами.
На крупнейших контейнерных терминалах Российской
Федерации, расположенных в морских портах (Новый порт и Петролеспорт в Санкт-Петербурге,
Усть-Луга, Новороссийск, Находка) актуальными являются идеи создания терминалов
для поточной обработки контейнеров, предложенные А.М.Кузовковым и китайской компанией
Shanghai Zhenhua Port Machinery Co Ltd (ZPMC).
Стоит также отметить необходимость
модернизации тяжелой и травмоопасной работы приемосдатчиков, связанной с
постановкой контейнеров в штабели или на вагоны под непосредственным контролем
приемосдатчиков. Внедрение автоматизированных
систем управления контейнерным терминалом
CTMS (Consid
Transport Management System),
принимающих оперативные решения о перемещении контейнеров в режиме реального
времени, позволит уменьшить степень риска.
Итак, российские контейнерные терминалы находятся на
этапе автоматизации и интеллектуализации терминально-складской
деятельности, создания современных информационных систем, которые позволят
моделировать процесс грузопереработки и перемещения контейнеров на
территории данных терминальных комплексов в режиме реального времени.
Это особенно актуально в связи с принятой
в нашей стране программой внедрения современных технологий и создания
интеллектуальных центров, подобных Сколково. Терминально-складские комплексы по
переработке контейнеров также нуждаются во всесторонней модернизации.
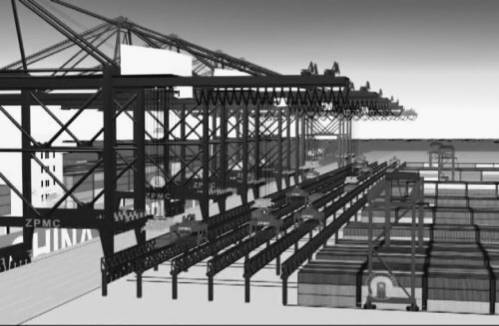
Рис.1 Макет терминала компании ZPMC

Рис.2 Схема транспортирования контейнеров
«консоль-консоль»
на терминале RST в Роттердаме.
Список
использованной литературы:
1. Кузнецов А.П. Методологические основы управления
грузовыми перевозками в транспортных системах. – ВИНИТИ РАН, 2002. – 276 с.,
илл.
2. «Логинфо» журнал о логистике в бизнесе. 1 -
2′10 (122). – 78 с.
3. Матюшин Л.Н., Баскаков П.В. Контейнерные и
контрейлерные перевозки грузов: Справочник. Часть 3. М., 2009. 287с.
4. Миротин Л.Б. Логистика, технология, проектирование
складов, транспортных узлов и терминалов/ Л.Б.Миротин, А.В.Бульба, В.А.Демин. –
Ростов н/Д: Феникс, 2009. – 408с.
5. Terminology on
Combined Transport. Prepared by the UN/ECE, the European Conference of
Ministers of Transport (ECMT) and the European Commission (EC)
New York and Geneva, 2001. P.55.
Сведения об
авторе:
Мамонтов Иван Юрьевич, аспирант Московского Государственного
Университета Путей Сообщения (МГУПС-МИИТ) по специальности 05.22.08 «Управление
процессами перевозок» кафедры «Логистические транспортные системы и
технологии», специалист 1 категории
сектора организации продаж услуг по перевозкам с участием Белоруссии, Украины и
Германии ОАО «ТрансКонтейнер».
Мобильный телефон: 89162499746
Рабочий телефон: +7 (495) 637 90 44 доб.4958
Адрес электронной почты: vanyamamontov@mail.ru
Научный руководитель: Заместитель генерального директора
ЗАО «Институт проблем транспорта и логистики» (ИПТИЛ) ВИНИТИ РАН,
доктор технических наук, профессор кафедры «Логистические
транспортные технологии и системы» МГУПС (МИИТ)
Кузнецов Александр Петрович.
Адрес Московского Государственного Университета Путей Сообщения
(МГУПС-МИИТ):
127994, г. Москва, ул. Образцова, д 9, стр. 9.
Адрес ОАО «ТрансКонтейнер»:
125047, г.
Москва, ул. Оружейный переулок, дом 19