Математика
Перспективы информационных наук
кандидат тех. наук
Буянкин В.М.,
Московский государственный технический
университет им. Н.Э.Баумана
кандидат
физ-мат. наук Ковалева С.К.
РНЦ ” Курчатовский институт”
Анализ локальной устойчивости,
базирующийся на затухании высших
производных ошибки обучения
нейронных сетей
Аннотация
В статье предлагается новый метод анализа
аппроксимируемой устойчивости нелинейных динамических систем, базирующийся на
производных высшего порядка обучаемых нейронных сетей в ξ приближении. В
этом методе стабильность первоначальной
траектории системы управления сложной технической установки, устойчивость которой
поддерживается производными высшего порядка обучаемой нейронной сети,
анализируется путем проверки, может ли траектория, сдвинутая по причине того
или иного возмущающего фактора, вернуться на свою первоначальную траекторию. В
результате исследования производных
можно определить, является ли
первоначальная траектория локально асимптотически устойчивой. Это альтернативный подход к анализу устойчивости линеаризованных нелинейных
динамических систем, который не требует сложных
вычислений. По результатам
моделирований анализ устойчивости может быть проведен путем вычисления
производных первого порядка любого нейросетевого узла с учетом первоначального изменения момента нагрузки. Таким образом, при стремлении к нулю этих производных во
временной бесконечности, траектория будет считаться локально асимптотически
устойчивой. Кроме того, другой подход к
областям асимптотической устойчивости
может быть
достигнут путем поиска такой области, где термы первого порядка, разложенные в
ряд Тэйлора, доминируют над термами второго порядка, на основании чего можно
предположить, что влияние термов высших порядков в этой области ничтожно мало
по сравнению с влиянием термов второго порядка.
1.Введение
При
включении нейронных сетей в замкнутые контуры управления сложных технических
установок появилась проблема анализа
устойчивости. Проблема устойчивости ставила в тупик первых исследователей. Сложно
было предсказать, какие нейронные сети,
состоящие из набора нейронов, связанных
между собой перекрестными обратными связями с нелинейными функциями
активации, будут устойчивы [1,2]. Нейроны могут объединяться в сети различными
способами, число слоев может быть неограниченным,
определение которых представляет собой серьезную математическую проблему,
основанную на использовании свойств аппроксимируемой функции.
При
расчете весов и смещений каждого слоя нейронов требуется время. Чем больше
слоев и нейронов, тем более длительным становится период квантования по времени. При этом, в зависимости от периода квантования, частотные характеристики нейронных сетей оказывают решающее влияние на устойчивость и
показатели качества процессов управления
сложными техническими установками [3]. Выполнение программ нейроуправления
сложной технической установкой в
реальном масштабе времени приводит к возникновению временных задержек.
Реальные сложные технические установки имеют нелинейные
статические и динамические характеристики и работают в условиях нечеткой
внешних возмущающих воздействиях. Поэтому определение устойчивости сложной технической
установки является важнейшей
задачей. Что касается устойчивости
нелинейных динамических систем, то уже долгое время широко применяются прямой
метод Ляпунова и методы анализа линейной устойчивости. Однако поиск необходимой
функции Ляпунова иногда представляется довольно затруднительным. Определенную трудность представляют и расчеты
данными методами локально асимптотических областей устойчивости.
В 1898 году Ляпунов разработал свой прямой метод, во многом основывающийся на
концепции энергии несвободных систем Лагранжа [4,5]. Кроме того, процедуры составления функции Ляпунова были
досконально изучены Красовским. Тем не
менее, поиски соответственной функции Ляпунова для нелинейных динамических
систем вызывают затруднения до сих пор.
С другой стороны, анализ линеаризованной модели устойчивости давно и
широко применяется благодаря популярной теореме Рауса-Гурвица для
линеаризованных нелинейных динамических систем. Таким образом, на сегодняшнее
время анализ устойчивости нелинейных динамических систем, какими являются
сложные технические установки, существующими методами представляет сложную
проблему.
2.Метод решения проблемы
Обучаемые нейронные сети
представляют универсальную матрицу, способную объединить алгоритмы обучения. Более того, можно сказать что, обучаемые нейронные сети являются
эффективным инструментом изучения
устойчивости любых нелинейных динамических систем. Известно, что обучение нейронных сетей проводится как минимизация
оценочной функции L , основанной на использовании градиентного алгоритма
[1].
![]() (1)
(1)
где ![]() представляет собой независимый от сети изменяемый параметр;
представляет собой независимый от сети изменяемый параметр; ![]() - коэффициент скорости обучения, соотнесенный с небольшой
положительной величиной;
- коэффициент скорости обучения, соотнесенный с небольшой
положительной величиной; ![]() - ранжированная
производная, влияющая на изменение L в результате изменения
значения
- ранжированная
производная, влияющая на изменение L в результате изменения
значения![]() притом, что остальные переменные в это время не
изменяются.
притом, что остальные переменные в это время не
изменяются.
Фактически, ранжированные производные, по
существу, идентичны типичным частным производным. Однако ранжированные производные обычно применяются в нейронных
сетях с целью получения более отчетливых изменений оценочной функции. Разница
между ранжированными производными и типичными частными производными заключается
в точке зрения, с которой мы
рассматриваем дифференцируемую функцию.
Верхний индекс t в (1)
используется для обозначения ранжированной производной. Благодаря использованию
верхнего индекса мы можем отличить ранжированные производные от типичных частных
производных.
При рассмотрении вопроса устойчивости
нелинейных динамических систем формулировка L должна состоять из двух
частей: базовой части Ec и
расширенной Ex
![]() , (2)
, (2)
где ![]() коэффициент
устойчивости, связывающий обе части уравнения
коэффициент
устойчивости, связывающий обе части уравнения
Характерным выбором Ec является сумма
ошибок между сетевыми выходными сигналами и их ожидаемыми значениями. Расширенная часть Ex может
являться функцией производных выходного сигнала сетевого узла hr с
учетом, например, момента нагрузки ![]() . В связи с тем, что Ex
содержит производные hr, градиент L содержит
не только первые ранжированные производные hr , но и производные второго порядка.
. В связи с тем, что Ex
содержит производные hr, градиент L содержит
не только первые ранжированные производные hr , но и производные второго порядка.
Расчет производных
Для
расчета ![]() необходимо учитывать как прямую, так и побочную связь между L
и
необходимо учитывать как прямую, так и побочную связь между L
и ![]() Прямая
связь вычисляется при помощи
Прямая
связь вычисляется при помощи![]() . Побочная связь вычисляется с помощью алгоритмов прямого
распространения, которые являются
развернутым продолжением рекуррентного обучения в реальном времени. При
помощи ниже приведенных формул можно определить
. Побочная связь вычисляется с помощью алгоритмов прямого
распространения, которые являются
развернутым продолжением рекуррентного обучения в реальном времени. При
помощи ниже приведенных формул можно определить ![]() и
и ![]()
 (3)
(3)
 (4)
(4)
Для оценки побочной связи между L и ![]() выход сетевого узла hr, непосредственно
влияющий на L , принимается за промежуточную переменную и расчет
выход сетевого узла hr, непосредственно
влияющий на L , принимается за промежуточную переменную и расчет ![]() производится следующим образом:
производится следующим образом:
 (5)
(5)
где Jo является
рядом нижних индексов сетевых узлов, выходы которых непосредственно участвуют в
оценке L. ![]() является
моментом времени, в течение которого осуществляется оценка L.
является
моментом времени, в течение которого осуществляется оценка L.
Номенклатура ![]() производной
первого порядка
производной
первого порядка![]() , рассчитывается при помощи дифференцирования (4.30) с учетом
, рассчитывается при помощи дифференцирования (4.30) с учетом
![]() :
:

(6)
Анализ
устойчивости с использованием нейронной сети
Устойчивость траектории определяется в целом следующим образом. Для
произвольного положительного действительного числа![]() и произвольного промежутка времени исходная траектория обучаемых нейронных сетей устойчива при
наличии
и произвольного промежутка времени исходная траектория обучаемых нейронных сетей устойчива при
наличии ![]() , при котором если
, при котором если ![]()
![]() , тогда
, тогда![]()
![]()
![]() . В противном случае исходная траектория неустойчива. Положим, что исходная траектория устойчива
асимптотически при наличии
. В противном случае исходная траектория неустойчива. Положим, что исходная траектория устойчива
асимптотически при наличии ![]() для любого t0
, при котором выполняется
условие
для любого t0
, при котором выполняется
условие ![]() .
.
В этом
случае ![]() =0, где
=0, где ![]() =(
=(![]() является первоначальным возмущающим вектором, воздействующим
на начальную траекторию, а
является первоначальным возмущающим вектором, воздействующим
на начальную траекторию, а ![]() =(
=(![]() является вектором смещения орбиты между
первоначальной траекторией и
нарушенной траекторией во времени t, вызванной
является вектором смещения орбиты между
первоначальной траекторией и
нарушенной траекторией во времени t, вызванной ![]() .
.
Введем
обозначение ![]() для ряда нижних
индексов сетевых узлов подверженных влиянию возмущающих факторов. Норма вектора смещения орбиты
для ряда нижних
индексов сетевых узлов подверженных влиянию возмущающих факторов. Норма вектора смещения орбиты ![]() вычисляется следующим
образом:
вычисляется следующим
образом:
![]() , (7)
, (7)
где разложение в ряд
Тейлора выражается как
 (8)
(8)
Таким образом, асимптотическая устойчивость любой нелинейной
системы может быть исследована путем расчета отклонения траектории,
вызванного первоначальными возмущающими
факторами. Расчет выполняется с применением производных высшего порядка обучаемых нейронных сетей, не прибегая к расчетам каждого первоначального возмущающего фактора
![]() .
.
Локальная асимптотическая устойчивость
На основе первого терма
в (8) можно сделать вывод, что линейное отклонение траектории можно вычислить,
произведя расчеты производной первого порядка с помощью алгоритма прямого
распространения следующим образом:
 (9)
(9)
где установлены следующие первоначальные значения ![]() { 1 или 0}
{ 1 или 0}
Если ![]()
![]() то
то ![]() , тогда локально
асимптотическая траектория является устойчивой при этом
, тогда локально
асимптотическая траектория является устойчивой при этом ![]()
![]() для малого
для малого ![]()
Во избежание сложных вычислений в предложенном методе анализа
устойчивости применяются производные первого порядка.
Области локальной асимптотической
устойчивости
Локально асимптотически устойчивые
области (Rlas) могут быть обнаружены путем
вычисления области, в которой имеется преобладание термов первого ранга над термами высшего ранга (при разложении их траекторий в ряд Тэйлора).
Другими словами, для приближения к областям
необходимо найти область, где термы первого порядка являются
доминирующими по сравнению с термами второго порядка с ![]() аппроксимацией,
предполагающей, что в данной области доля термов высшего порядка ничтожно мала.
Производная второго порядка, необходимая для разложения в ряд Тейлора,
вычисляется путем дифференцирования (8) с учетом
аппроксимацией,
предполагающей, что в данной области доля термов высшего порядка ничтожно мала.
Производная второго порядка, необходимая для разложения в ряд Тейлора,
вычисляется путем дифференцирования (8) с учетом ![]() :
:
 .
.
(10)
Предлагаемый метод легко осуществим, и требует лишь сопоставления термов первого и второго порядков. Таким
образом, при небольшом ![]() размер области Rlas может быть рассчитан как:
размер области Rlas может быть рассчитан как:
H(n)= ,
(11)
,
(11)
![]() =
=![]() . (12)
. (12)
Результатом соотношений (11) и (12) становится
укрепление возникающего неравенства термов n-ого снижения разложения в ряд Тейлора при сравнении
максимума термов второго порядка и максимума термов первого порядка до уровня
ниже![]() :
:
 (13)
(13)
Для малого значения ![]() размер
размер ![]() может быть вычислен
по следующей формуле:
может быть вычислен
по следующей формуле:
 (14)
(14)
Соответственно, основываясь на (14) максимальная область асимптотической локальной устойчивости ![]() рассматривается как
размер локально асимптотически устойчивой области и рассчитывается следующим образом:
рассматривается как
размер локально асимптотически устойчивой области и рассчитывается следующим образом:
![]() (!5)
(!5)
где, ![]() - положительная константа, соотнесенная с небольшим значением
для гарантии точности расчетов
- положительная константа, соотнесенная с небольшим значением
для гарантии точности расчетов ![]() . Для нашей задачи значение
. Для нашей задачи значение ![]() установлено в 0,01.
Необходимо учитывать, что максимальная величина области
установлено в 0,01.
Необходимо учитывать, что максимальная величина области ![]() в соответствии с (5) является приблизительным коэффициентом
локально асимптотически устойчивой области, зависящим от
в соответствии с (5) является приблизительным коэффициентом
локально асимптотически устойчивой области, зависящим от ![]() .
.
Нейроидентификация
Рассмотрим применение данного метода анализа устойчивости в
режиме нероидентификации статических и динамических характеристик сложной технологической установки. Структурная схема нейроидентификации сложной
электротехнической установки нейронной
сетью отображена на рис. 1
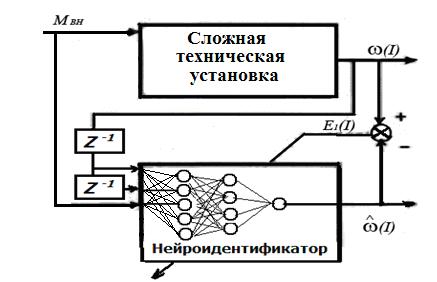
Рис. 1.
Структурная схема нероидентификации электропривода нейронной сетью
На выходе нейроидентификатора получается идентифицированная
частота вращения электродвигателя ![]() . Независимый
от нейроидентификатора параметр
. Независимый
от нейроидентификатора параметр ![]() обновляется по
градиентному алгоритму, приведенному в (16), где
обновляется по
градиентному алгоритму, приведенному в (16), где ![]() отображает изменение
независимого от нейроидентификатора параметра;
отображает изменение
независимого от нейроидентификатора параметра; ![]() - оценочная функция нейроидентификатора, приведенная в
(7);
- оценочная функция нейроидентификатора, приведенная в
(7); ![]() - набор
моментов, относящихся к оценке
- набор
моментов, относящихся к оценке ![]() и
и ![]() , и являющихся показателем скорости обучения и
коэффициентом количества движения нейроидентификатора:
, и являющихся показателем скорости обучения и
коэффициентом количества движения нейроидентификатора:
![]() (16)
(16)
![]() (17)
(17)
Ранжированная производная ![]() вычисляется по
формуле:
вычисляется по
формуле:
![]() (18)
(18)
Для нашей задачи терм ![]() всегда равняется нулю. Производные
всегда равняется нулю. Производные ![]() вычисляются с помощью алгоритма прямого
распространения.
вычисляются с помощью алгоритма прямого
распространения.
3. Пример решения проблемы
![]() Проведем
практическую проверку метода
устойчивости, базирующегося на анализе
высших производных ошибки обучения
нейронных сетей, используя режим нейроидентификации электропривода металлорежущего станка с асинхронным двигателем
переменного тока (рис. 2).
Проведем
практическую проверку метода
устойчивости, базирующегося на анализе
высших производных ошибки обучения
нейронных сетей, используя режим нейроидентификации электропривода металлорежущего станка с асинхронным двигателем
переменного тока (рис. 2).
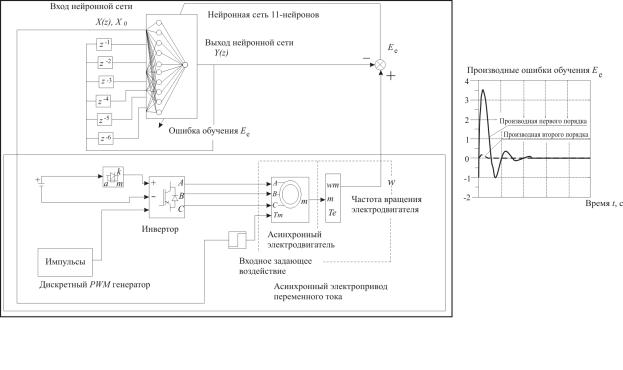 Рис.
2. Структурная схема анализа
устойчивости в режиме
нейроидентификации электропривода металлорежущего станка с асинхронным
двигателем переменного тока
Рис.
2. Структурная схема анализа
устойчивости в режиме
нейроидентификации электропривода металлорежущего станка с асинхронным
двигателем переменного тока
Оценочная функция L
состоит из двух частей: базовой части Ec и расширенной Ex.
Для нашей задачи, Ec и
Ex представлены в (7) и (4), соответственно ![]() и
и![]() являются показателем скорости обучения и коэффициентом
количества движения нейроидентификатора и определяются по формулам:
являются показателем скорости обучения и коэффициентом
количества движения нейроидентификатора и определяются по формулам:
![]() . (19)
. (19)
![]() . (20)
. (20)
 . (21)
. (21)
Ранжированные производные  и
и  вычисляются:
вычисляются:
![]() (22)
(22)
 (23)
(23)
Производные
первого порядка и
и вычисляются с помощью алгоритма прямого
распространения (19) производные второго порядка
вычисляются с помощью алгоритма прямого
распространения (19) производные второго порядка 
![]() вычисляются с помощью (21).
вычисляются с помощью (21).
Для передач
управления с запаздыванием, первоначальные значения
![]()
![]()
![]()
![]()
![]()
и ![]() устанавливаются равными нулю в начале каждого обновления
размера группы сигналов
устанавливаются равными нулю в начале каждого обновления
размера группы сигналов ![]() . Моделирование электропривода проводится с рассмотрением
четырех различных значений коэффициента устойчивости -
. Моделирование электропривода проводится с рассмотрением
четырех различных значений коэффициента устойчивости -![]() ,0, 50, 75
и 100, при моменте нагрузки в постоянном значении 20 Нм.
,0, 50, 75
и 100, при моменте нагрузки в постоянном значении 20 Нм.
При экспериментальном
исследовании локальной асимптотической
устойчивости и расчетом области Rlas устойчивости первоначальной траектории необходимо выполнить следующие пять действий:
- при помощи
нейроидентификатора осуществить идентификацию;
- при помощи
нейроконтроллера провести тестирование с применением двух отдельных значений ![]() равных 15 и 25 Нм при значении
равных 15 и 25 Нм при значении ![]() = 100;
= 100;
- после тестирования вычисляются
производные![]() первого и второго порядков с учетом
первого и второго порядков с учетом ![]() (t
(t![]() ), где
), где ![]() и
и ![]() из формул (14) и (15) принимают приблизительное значение
из формул (14) и (15) принимают приблизительное значение ![]() (t
(t![]() );
);
- проверить сближение производных первого
порядка с предположением, что первоначальный возмущающий фактор передается ![]() в момент to. Если отмечается стремление производных к нулю во временной
бесконечности, траектория является локально асимптотически устойчивой;
в момент to. Если отмечается стремление производных к нулю во временной
бесконечности, траектория является локально асимптотически устойчивой;
- провести сравнение между производными
первого и второго порядков, с возможным вычислением области Rlas с помощью (20).
Производные первого и второго порядков
частоты вращения электропривода с
внешними возмущающими моментами нагрузки, равными 15 и 25 Нм, показаны на рис. 3, 4. Исходя из этих
данных, можно сделать заключение, что на всех графиках производные первого
порядка на конечной стадии пришли к нулю. Из этого следует, что все траектории
являются локально асимптотически устойчивыми. Тем не менее, на каждом графике
транзиенты отличаются друг от друга в соответствии с величиной момента нагрузки.
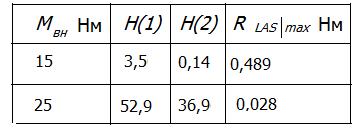
Максимальные амплитуды производных первого и второго порядков H(1) и
H(2) при двух значениях величины момента нагрузки
представлены в таблице I. В данной таблице также представлены значения ![]() (в Нм.),
полученные с применением (4.39), где
(в Нм.),
полученные с применением (4.39), где ![]() принимается
за 1,0, т.е. учитывается только одна переменная, подверженная влиянию
возмущающего фактора. В приведенной таблице ясно видно, что H(1) всегда
больше H(2) , а наибольшее значение тенденции наблюдается при моменте
нагрузки в 25 Нм. Кроме того, с увеличением момента нагрузки отмечается
уменьшение максимального размера локально асимптотически устойчивой области.
Таким образом, увеличение значения момента нагрузки непосредственно
связано с повышением неустойчивости системы. Соответственно, вычислив RLAs\max,
можно определить величину возмущающих факторов момента нагрузки, которые
приводят к неустойчивости электропривода.
принимается
за 1,0, т.е. учитывается только одна переменная, подверженная влиянию
возмущающего фактора. В приведенной таблице ясно видно, что H(1) всегда
больше H(2) , а наибольшее значение тенденции наблюдается при моменте
нагрузки в 25 Нм. Кроме того, с увеличением момента нагрузки отмечается
уменьшение максимального размера локально асимптотически устойчивой области.
Таким образом, увеличение значения момента нагрузки непосредственно
связано с повышением неустойчивости системы. Соответственно, вычислив RLAs\max,
можно определить величину возмущающих факторов момента нагрузки, которые
приводят к неустойчивости электропривода.

Рис. 3. Производные первого и
второго порядка при ![]() =15 Н.м.
=15 Н.м.
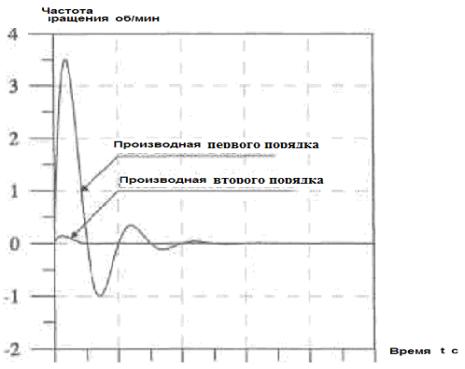
Рис. 4. Производные
первого и второго порядка при ![]() =25 Нм
=25 Нм
Таблица 1.
Максимальные амплитуды производных, максимальные
области локальной асимптотической устойчивости
4. Заключение
Разработанный метод анализа локальной устойчивости, базирующийся на затухании высших производных ошибки обучения нейронной сети показал, что этот метод можно
применять для сложных технических установок. При стремлении к нулю этих
производных во временной бесконечности, мы будем иметь локально асимптотическую устойчивость.
Этот метод
был успешно проверен при нейроидентификации статических
и динамических характеристик электропривода металлорежущего станка с асинхронным двигателем переменного тока.
Литература
1. Буянкин В.М. Нейронные сети в управлении. Издание LAMBERN
Academic Publishing Germany, 2011г 300 с.
2. Буянкин В.М., Каганов Ю.Т. Нейроуправление роботами с параллельной кинематикой Издание LAMBERN
Academic Publishing Germany, 2011г 165с.
3.Буянкин
В.М., Гоменюк С.М., Карпенко А.П., Литун
Т.О. Нейросетевая идентификация и управление некоторыми механизмами
параллельной кинематики Приложение к журналу “Информационные технологии” №11/2011
4. Буянкин В.М.
Применение искусственной нейронной сети в режиме идентификации
динамических параметров электродвигателя.
Вестник МГТУ им. Н.Э.Баумана, Сер. “Приборостроение” 2006. №3 с.25-30
5. Буянкин В.М. Двухконтурная система нейроуправления
электроприводом с нейросамонастройкой.
Нейрокомпьютеры разработка и применение 2006 г.№8-9 с.90-94