Технические науки/9.Авиация и космонавтика
к.т.н.
В.И.Бойков, к.т.н. С.В.Быстров, д.т.н. В.В.Григорьев,
к.т.н. Ю.В.Литвинов,
к.т.н. О.К.Мансурова
Санкт-Петербургский
национальный исследовательский университет
информационных
технологий, механики и оптики, Россия
Принципы
построения многоприводных систем управления в адаптивной оптике
Основным
исполнительным элементом многоприводной системы адаптивной оптики является
зеркало с изменяемой формой поверхности. В зависимости от решаемой технической
задачи такие зеркала изготавливаются секционированными ( составными ) либо
монолитными ( гибкими ).
Наиболее простыми являются системы с секционированными
зеркалами, приводы которых перемещают зеркальные сегменты только по одной
продольной координате. Использование таких зеркал позволяет вносить фазовые
сдвиги в отдельные зоны сечения оптического излучения.
Использование только одного привода для перемещения
сегмента позволяет организовать систему управления в виде одноуровневой многосвязанной
системы с обратной связью. На рисунке 1 показана схема организации такой системы
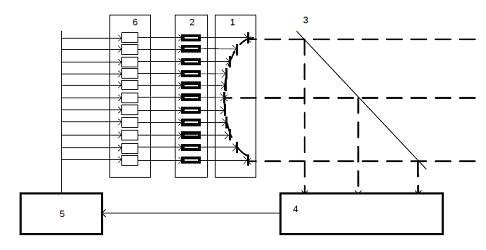
Рисунок 1. Структурная схема управления составным
зеркалом

Однако, организация
системы управления в виде одноуровневой многосвязанной системы приводит к наиболее простой ее структуре.
Однако из-за высокой размерности уравнений модели динамики системы возникают
значительные трудности при решении задач идентификации параметров и синтеза
закона управления. В результате в системах с единой многосвязанной структурой редко
удается получить приемлемое качество регулирования формы
волнового фронта. Иногда применяют схемы
перемещения сегмента с шестью толкателями, что позволяет повысить жесткость
конструкции и как правило, снизить погрешности работы системы. Но большое количество
толкателей делает невозможным регулирование по одноуровневой схеме. В таких
системах для формирования управления используется
несколько иерархических уровней.
На рисунке 2 показана
структурная схема системы управления
отдельным сегментом по трем степеням подвижности. Для
простоты рассмотрена
система с тремя толкателями.
Положение
зеркального сегмента по трем степеням подвижности
определяется перемещениями штоков толкателей (
пьезодвигатели ПД1-
ПД3). Упраление перемещениями штоков толкателей
управляет микроконтроллер МК через преобразователи управления ПУ и высоковольтные
усилители ВУ. Текущие положения штоков толкателей измеряются датчиками
положения ДП1-ДП3. Сигналы с датчиков через преобразователи ПУ1-ПУ3 и
буферизованные входы В поступают на коммутатор сигналов К. Аналого-цифровой
преобразователь АЦП оцифровывает сигналы с датчиков и полученные значения
поступают в микроконтроллер. Таким образом система управления одним зеркальным сегментом
представляет собой законченную цифровую следящую систему с обратной связью.
Размерность уравнений динамики зеркального сегмента оказывается не очень
большой, что позволяет синтезировать закон управления сегментом, обеспечивающим
высокое качество процесса регулирования. Микроконтроллер по последовательной
линии связи получает от внешней ЭВМ (ЭВМ ВУ ) команды на перемещение
зеркального сегмента и по той же линии связи передает в ЭВМ ВУ информацию от
текущем положении зеркального сегмента что обеспечивает объединение произвольного
количества зеркальных сегментов в единую
систему управления.
Иерархическая
организация системы управления корректором волнового фронта позволяет разбить
единую задачу большой размерности на несколько задач меньшей размерности, что
делает возможным синтезировать качественные законы управления
в системе адаптивной оптики. При синтезе законов управления для многоприводных
устройств возникает дополнительная трудность - разброс параметров двигателей. Поэтому
при разработке таких устройств весьма важна задача синтеза закона управления с
низкой чувствительностью к разбросу параметров двигателей.
Литература
1.
Бойков В.И., Быстров С.В.,Григорьв В.В.,
Карташев Р.А. Система управления положением сегментов составного зеркала
адаптивного телескопа.- Известия ВУЗов Приборостроение, том 47, №8, 2004,
с.67-69
2.
Бойков В.И., Быстров С.В., Карташев Р.А.,
Цицулин А.К. Интерференционный измеритель
положения зеркала с цифровой обработкой изображения.- Проблемы машиноведения и
машиностроения: межвузовский сборник. Выпуск 36, СПб, СЗГЗТУ, 2006, с. 133-138.
Сведения
об авторах:
1. Бойков
Владимир Иванович
Санкт-Петербургский национальный
исследовательский университетинформационных технологий, механики и оптики, Санкт-Петербург, Россия, к.т.н., доцент кафедры
Систем управления и информатики, г. Санкт Петербург, Новосмоленская наб., д. 1,
кв. 123
р.т. (812) 595-41-28, д.т. (812) 232-25-51
Email : viboikov@mail.ru
Boikov Vladimir Ivanovich
St. Petersburg National Research University
of Information Technologies, Mechanics
and Optics, St. Petersburg, Russia, the senior lecturer of the Department of
Control Systems and Informatics, St. Petersburg, Novosmolenskay imb., h.1, flat
123.
2. Быстров Сергей Владимирович
Санкт-Петербургский национальный
исследовательский университет информационных технологий, механики и
оптики, Санкт-Петербург, Россия,
к.т.н., доцент кафедры Систем управления и информатики, адрес:
Санкт-Петербург, Невский пр., д.109, кВ.
28
р.т. (812) 595-41-28, д.т. (812) 717-14-11
Email : sbystrov@mail.ru
Bystrov
Sergey Vladimirovich
St. Petersburg
National Research University of
Information Technologies, Mechanics and Optics, St. Petersburg, Russia, the
senior lecturer of the Department
of Control Systems and Informatics, St. Petersburg, Nevskey pr.,
h. 109, flat.28
3. Григорьев
Валерий Владимирович.
Санкт-Петербургский национальный исследовательский университет
информационных технологий, механики и оптики,
Санкт-Петербург, Россия д.т.н., профессор кафедры Систем управления и информатики,
адрес: г.Санкт-Петербург,
ул. Ленина, д.50, кв.31,
р.т. (812) 595-41-28, д.т. (812) 235-55-34
Email: grigvv@yandex.ru
Grigoriev Valery
Vladimirovich.
St. Petersburg
National Research University of
Information Technologies, Mechanics and Optics, St. Petersburg, Russia, the
professor of the Department of Control
Systems and Informatics, St. Petersburg, Lenina str., h. 50, flat. 31.
4. Литвинов
Юрий Володарович,
доцент кафедры
Систем Управления и Информатики Санкт-Петербургский
национальный исследовательский университет информационных технологий, механики
и оптики, Санкт-Петербург, Россия, к.т.н., г. Санкт-Петербург, ул.Решетникова, д.3,
кв.30
р.т. (812) 595-41-28, д.т. (812) 656-97-25 Email: yurl13@yandex.ru
Litvinov Jury Volodarovich
St. Petersburg National
Research University of Information
Technologies, Mechanics and Optics, St. Petersburg, Russia, the senior lecturer
of the Department of Control Systems and Informatics, St. Petersburg,
Reshetnikova str., h.3, flat 30.
5.
Мансурова Ольга Карибековна
доцент кафедры Автоматизации производственных
процессов Санкт-Петербургского Северо-Западного технического университета,
адрес: г.Санкт-Петербург, ул. Ленина, д.50,
кв.31,
р.т. (812) 595-41-28, д.т. (812)
235-55-34 Email: erke7@mail.ru
St. Petersburg North-West
State Technical University the senior
lecturer of the Department of Control of Technologic processes, St. Petersburg,
Lenina str., h. 50, flat. 31