Биологические науки/11. Биоинженерия и
биоинформатика
Д.т.н.,
проф. Яцун С.Ф., к.т.н., доц. Рукавицын А.Н.
Юго-Западный
государственный университет
К вопросу создания
биоинженерного мехатронного модуля для экзоскелета человека
Современная биоинженерия базируется на знаниях в
области медицины, биологии, механики, электроники, современных методах
компьютерного управления и обработки информации. Биоинженеры работают на благо
человечества, имеют дело с живыми системами и применяют передовые технологии
для решения медицинских проблем. Специалисты по биомедицинской инженерии могут
участвовать в создании приборов и оборудования, в разработке новых процедур на
основе междисциплинарных знаний, в исследованиях, направленных на получение
новой информации для решения новых задач. Среди важных достижений биоинженерии
можно упомянуть разработку искусственных суставов, магниторезонансной
томографии, кардиостимуляторов, артроскопии, ангиопластики, биоинженерных
протезов кожи, почечного диализа, аппаратов искусственного кровообращения [1].
В России биотехнология и биоинженерия входят в
список девяти самых приоритетных научных направлений. К сожалению, масштабы
исследований по биоинженерии в России резко отличаются от западных: из
государственного бюджета выделяется значительно меньше средств, чем в США [2].
Практическое приложение достижений в
биоинженерной технике носит значительный социально-значимый характер. Среди
важнейших социальных проблем, стоящих в настоящее время, одной из основных,
является реабилитация и социальная защита инвалидов, которые позволили бы им
стать полноправными членами общества в равной степени со здоровыми людьми,
принимать активное участие во всех сторонах общественной жизни. Именно
достижения биоинженерии позволяют значительно повысить качества жизни инвалидов
и больных с нарушениями опорно-двигательного аппарата и проходящих реабилитацию
[3].
Целью
реабилитации инвалида является восстановление его социального статуса,
достижение им материальной независимости и его социальная адаптация. Обеспечение
техническими (биоинженерными) средствами реабилитации для осуществления
механотерапии, является частью реализации комплекса мероприятий по улучшению
качества жизни людей различных социальных групп.
Механотерапия
- это метод лечения, состоящий в выполнении физических упражнений на аппаратах,
специально сконструированных для развития движений в отдельных суставах. При
помощи подобных устройств можно изменять скорость ритмически производимых
движений. Методы механотерапии не имеют самостоятельного значения, и
применяется в лечебной физкультуре преимущественно как дополнительное
воздействие на отдельные участки опорно-двигательной системы [4]. Различают
механотерапию с помощью аппаратов пассивного действия - когда движения больного
осуществляются с помощью специального привода (мотора), которые облегчают
движения. Такой вид механотерапии применяется при повреждении связочного
аппарата суставов, после ушибов мягких тканей и растяжения мышц, после
переломов костей конечностей, после артротомии, остеотомии, артролизиса,
резекции опухолей в области сустава, оперативных вмешательств на мягких тканях
в области сустава, операций по перемещению мышц в области сустава, после
артроскопических оперативных вмешательств, после эндопротезирования суставов;
при проведении реабилитации протезированных больных с ампутационными дефектами
конечностей. Механотерапия с помощью аппаратов активного действия - когда
больной приводит в действие аппарат за счет мышечного усилия [5].
Экзоскелеты - одна из
инновационных биоинженерных технологий, которая заключается в разработке
специальных мехатронных устройств в виде внешнего каркаса человека, благодаря
которым увеличивается его мускульная сила. Он повторяет биомеханику человека для
пропорционального увеличения усилий при движениях. Данная технология позволяет сочетать интеллект человека и силу машины,
так как оператор становится частью машины. Такой каркас может встраивается в
специальный костюм, и он способен повторять биомеханику человека, значительно
увеличивая его физическую силу. Принцип работы устройства такой же, как и у всех
мехатронных систем: сенсоры подают двигателям сигналы, действие каких мышц
нужно сымитировать. Производительность человека-оператора экзоскелета, таким
образом, усиливается в несколько десятков раз. Экзоскелеты могут использоваться
как в вооруженных силах, так и в терапевтических целях – для помощи людям с
физическими недостатками, после травм и с проблемами с опорно-двигательным
аппаратом. С помощью подобных систем человек сможет переносить громоздкие грузы
с большой скоростью и ориентироваться на незнакомой местности [6].
Учитывая описанные выше методы, а также,
предъявляемые к конструкциям реабилитационных устройств, требования, можно
сделать вывод о том, что разрабатываемые мехатронные модули, интегрируемые
в биоинженерные роботизированные
системы должны полностью имитировать работу суставов человека при ходьбе и обеспечивать
тренировку мышц конечностей во всем диапазоне их углового перемещения. При этом
конструкция и кинематические параметры, разрабатываемого коленного мехатронного
модуля должны позволять использовать устройство для следующих упражнений:
- принудительного сгибания или разгибания нижней
конечности в коленном суставе;
- поддержки ноги человека в согнутом состоянии в
период времени не менее 1 часа;
- создания полезного сопротивления
сгибанию-разгибанию нижней конечности в коленном суставе в указанном положении
при активной тренировке мышц нижних конечностей.
Автоматизированный мехатронный модуль для экзоскелета,
должен быть оснащен интеллектуальным микропроцессорным управлением с
биологически-обратной связью, осуществлять постоянный мониторинг и корреляцию
между угловым перемещением сустава, который является объектом измерения, и биосигналом произвольной мышцы около сустава.
Механотерапия с применением экзоскелетов
предназначается для избирательного воздействия на определённые функции
двигательной системы человека. Однако при существующем разнообразии подобных
реабилитационных устройств достаточно мало внимания уделяется математическому
описанию их функционирования в составе сложной человеко-машинной системы. Так,
одной из главных проблем, возникающих при создании роботизированных устройств
(экзоскелетов) для механотерапии, является необходимость как можно более
точного соответствия осевых линий устройства с осевыми линиями суставов
человека. В противном случае процесс движения становится неконтролируемым,
получаемые траектории движения не будут совпадать с требуемыми, что может
привести к недопустимому увеличению моментов, возникающих в суставах, и в
конечном итоге нанести вред пациенту [7].
Для того чтобы обеспечить возможность
исследовать движение ноги человека и биоинженерного мехатронного устройства как
единой человеко-машинной системы, необходимо иметь четкое представление о том,
каким образом происходят естественные движения в коленном суставе, а также
движения совместно с механотерапевтическим устройством [8].
Биоинженерная система может быть представлена в виде двух отдельных подсистем
мехатронного типа, каждая из которых включает в себя три взаимосвязанных части:
механическую, электронно-электротехническую и компьютерную (рисунок 1).
Взаимодействие между подсистемами осуществляется через механические интерфейсы
(связи).
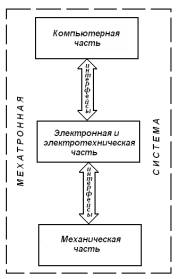
Рисунок 1 Компоненты мехатронной
подсистемы
Структурно мехатронные подсистемы являются
многомерными и многосвязными.
Размерность задачи управления в мехатронике определяется числом
независимо управляемых приводов данной подсистемы. В случае общего механизма
исходно задается желаемое движение исполнительного органа, а реализуется оно
совокупными перемещениями всех звеньев. Отсюда возникают специальные
математические, алгоритмические и технические задачи управления [9].
Многосвязность мехатронной подсистемы означает,
что движение каждого звена влияет на движение остальных звеньев. Указанное
взаимовлияние происходит через механическое устройство как общую нагрузку,
через общий источник энергии, а также вследствие естественных и
искусственных динамических связей между
каналами управления в блоке приводов. Следовательно, необходимо информировать
управление мехатронной подсистемы (особенно на высоких скоростях, где влияние
динамических факторов существенно) с учетом перекрестных связей.
Проблемным является вопрос организации обратных
связей при управлении многозвенными мехатронными подсистемами. Технически
наиболее просто устанавливать датчики
положения и скорости в приводных модулях. Однако затем необходимо вычислить в реальном времени
фактическое перемещение исполнительного органа. Причем этот компьютерный расчет
требует построения адекватной динамической модели системы с учетом весьма
сложных для аналитической оценки факторов:
- всех действующих сил (управляющих моментов
приводов, сил трения и диссипации, внешних сил и моментов, сил инерции);
- первичных погрешностей системы (упругих
деформаций звеньев, люфтов в механических передачах, погрешности изготовления и
сборки отдельных узлов) которые определяют
ее интегральные точностные характеристики в текущей конфигурации;
- переменных параметров объекта управления
(приведенных моментов инерции и масс механизма и нагрузки).
Современное реабилитационное роботизированное механотерапевтическое
устройство представляет собой систему
со сложной конфигурацией, объединяя в себе различные механические и электронные компоненты, призванные в совокупности
обеспечивать максимально эффективный и безопасный процесс реабилитации
пациентов. При этом большое значение приобретают функциональные возможности
каждого узла, из которых и складываются характеристики устройства. В силу того,
что работа практически любого механотерапевтического устройства в конечном
итоге сводится к механическому взаимодействию непосредственно с конечностью
пациента, особое внимание стоит уделить элементу, соединяющему конечность
человека с реабилитационным оборудованием.
Задачей разрабатываемого биоинженерного
мехатронного устройства является преобразование информации о цели управления,
поступающей с верхнего уровня, в целенаправленное функциональное движение системы с управлением на основе принципов
обратной связи [9]. Блок-схема, иллюстрирующая ход энергетических
и информационных потоков в таком мехатронном устройстве, приведена на рисунке 2.
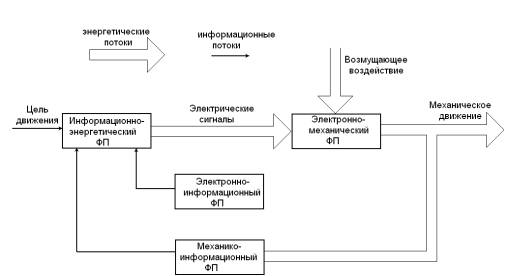
Рисунок 2 Информационные и энергетические
потоки в мехатронной системе и функциональные преобразователи (ФП)
Таким образом, для физической реализации
мехатронной системы теоретически необходимые четыре основных функциональных
блока: последовательно соединенные информационно-электрический
и электромеханический энергетические преобразователи в прямой цепи и
электро-информационный и информационный
преобразователи в цепи обратной связи. Если же работа исполнительного
устройства мехатронного модуля, с энергетической точки зрения, основана на
гидравлических, пневматических комбинированных (например,
электрогидравлических) процессах, то очевидно необходимы соответствующие
преобразователи и датчики в цепи обратной связи.
В заключении необходимо отметить, что разработка
и обеспечение биоинженерными средствами реабилитации больных с повреждениями
опорно-двигательного аппарата является частью реализации комплекса мероприятий
по улучшению качества жизни людей различных социальных групп. Анализ конструкций
экзоскелетов и медицинских мехатронных устройств для осуществления механотерапии,
прежде всего, с помощью аппаратов пассивного действия позволяет определить механотерапию, как
метод активной и патогенетической терапии, обуславливающей повышение функциональной
адаптации больного.
Список использованных
источников
1.
Яцун,
С.Ф. Определение параметров приводов биоинженерных мехатронных модулей для
экзоскелета нижних конечностей человека [Текст]: / С.Ф. Яцун, А.Н. Рукавицын// Известия ЮЗГУ. Серия: Техника и технологии, 2012. Ч.1 - №2 - C.196-200
2.
Саврасов, Г.В. Медицинская робототехника: Условия, проблемы и основные
принципы проектирования [Текст]:/Г.В. Саврасов// Биомедицинская инженерия и
технология. №2, 1998.- С. 35 – 50.
3.
Коган, О.Г. Медицинская реабилитация в неврологии и нейрохирургии [Текст]: /
О.Г. Коган, В.Л. Найдин// М.: Медицина, 1988. -304 с.
4.
Епифанов, В. А. Лечебная физическая культура и спортивная медицина [Текст]:
Учебник / В.А. Епифанов // М.: Медицина 1999, -304 с.
5.
Белова, А.Н.
Нейрореабилитация [Текст]: /А.Н. Белова//М.: Антидор, 2000. 568с.
6.
Журнал «CHIP» №7, 2011 г. [Электронный ресурс]. - Режим доступа: http://www.chip.ua/stati/go-digital/2011/07/ekzoskelety-supervozmozhnosti-dlya-cheloveka, свободный.
7.
Яцун, С.Ф.
Кинематический анализ движения руки в локтевом суставе при реабилитации
методами механотерапии [Текст]: / С.Ф. Яцун, Е.С. Тарасова// Известия
Самарского научного центра Российской академии наук, т.13, №4(4), 2011. –
С.1215-1220
8.
Яцун, С.Ф.
Применение мехатронных систем [Текст]: Учеб. пособие/ С.Ф. Яцун, А.Н.
Рукавицын// Курск: Изд-во ЮЗГУ, 2011. -180с.
9.
Подураев,
Ю.В. Основы мехатроники: учебное пособие [Текст]:/ Ю.В.
Подураев; Из-во
МГТУ «Станкин» - М.; 1999. – 80 с.