технические науки / 4. транспорт
К.т.н. Мурог И.А.; к.т.н. Шабалин Д.В.; к.т.н Терещенко Е.С.;
Тараканов И.П.
Омский танковый инженерный институт имени Маршала
Советского Союза П.К. Кошевого филиал Военного учебно-научного центра
Сухопутных войск «Общевойсковая академия ВС РФ», г. Омск
К вопросу о
модернизации рулевого управления автомобилей многоцелевого назначения
На основе проведенных ранее исследований
установлено, что для устранения недостатков, присущих транспортным средствам с
передними и задними управляемыми колесами (УК) необходимо, чтобы угловая
скорость поворота задних колес была меньше угловой скорости поворота
автомобиля, и боковая реакция на задней оси не меняла свой знак. Установлено,
что для обеспечения необходимого соотношения угловой скорости поворота задник
УК и угловой скорости автомобиля угол поворота задних колес должен изменяться
по следующему закону [1]:
![]() (1)
(1)
где а, b, с - постоянные коэффициенты. При этом с<0, b >0
В работе получены формулы для расчета
значений коэффициентов а, b и c в зависимости от максимального угла поворота передних
колес и угла запаздывания, выбираемого для конкретного автомобиля.
|
где |
(2) |
|
|
|
Численные значения коэффициентов для угла
запаздывания Өά = 0.07 рад и максимального угла поворота управляемых
колес Ө 1max 0.3 рад равны:
а - 383.6; b - 2.55; с - 13.5.
Оценка
эффективности рулевого управления (РУ)
с усилителем гидравлического типа (УГТ) с переменным реактивным действием
Для оценки качества силового слежения в работе предложен коэффициент
информативности Ki
 (3)
(3)
где
Kp - дифференциальный
порог ощущения усилия; Pr
- усилие на руле, Н; Pfr -
силы трения в приводе распределителя, Н; Prmax-
максимальное усилие на рулевом колесе при установившемся движении с боковым
ускорением.
Необходимое качество
управления может быть достигнуто, если величина коэффициента информативности
меньше дифференциального порога ощущения водителем боковых ускорений.
В работе проведана сравнительная оценка
рулевого управления с УГТ проводится с устройствами, обеспечивающими переменное
реактивное действие путем регулирования расхода насоса, давления на входе в
распределитель и площади реактивных уст ройств.
Установлено [2], что изменение реактивного
действия регулированием расхода насоса
приводит к значительному увеличению усилия на РК при больших скоростях его
поворота. Зависимость усилия на рулевом колесе от расхода насоса явно нелинейна
и определяется не только расходом, но и конструкцией распределителя и
трубопроводов. Это затрудняет выработку алгоритма управления усилием на РК в
зависимости от момента сопротивления повороту колес регулированием расхода
насоса. Кроме того, увеличение усилия на РК при больших скоростях его поворота
недопустимо, что предъявляет повышенные требования к быстродействию системы
регулирования.
Управление реактивным действием путем
регулирования площади реактивных устройств теоретически наиболее
предпочтительно по сравнению с остальными способами регулирования. Однако
конструкционная реализация этой идеи очень сложна. Использование существующих
конструкционно-технологических решений ведет к значительному увеличению
размеров распределителя и усложнению его конструкции.
В работе к рассмотрению принят УГТ с
регулированием давления рабочей жидкости, т.к. управление реактивным действием путем регулирования давления позволяет
обеспечить плавное изменение усилия на рулевом колесе. Кроме того,
регулирование давления более предпочтительно, поскольку его изменение
практически прямо пропорционально
показателю эффективности
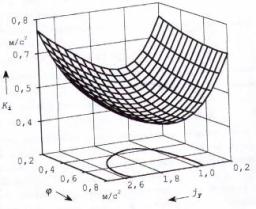
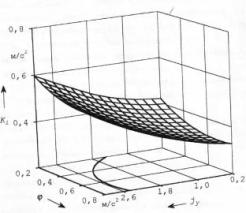
усилителя. В работе установлена зависимость изменения
коэффициента информативности РУ от бокового ускорения и коэффициента сцепления
с опорной поверхностью (рис. 1). Установлено, что величина коэффициента
информативности выше
дифференциального порога ощущения ускорений при уменьшении
коэффициента сцепления, боковых
ускорений до 0.8 м/с2 и больше 2.2 м/с2.
|
|
Рисунок 1 - Зависимость коэффициента
информативности от коэффициента
сцепления и бокового ускорения |
Улучшение “чувства дороги” с ростом
бокового ускорения может быть достигнуто путем увеличения усилия на РК.
Однако увеличение усилия на РК на дорогах
с высоким коэффициентом сцепления нежелательно так как это может привести к
затруднению управления автомобилем из-за повышенного усилия на РК. Поэтому, в
первую очередь, необходимо повышение
информативности РУ в зоне небольших ускорений и малого коэффициента сцепления.
Это может быть обеспечено путем увеличения показателя реактивного действия в
зоне малых значений момента сопротивления повороту управляемых колес и
снижением потерь на трение в РУ [2].
В работе установлен закон управления
системой регулирования усилия на РК путем управления давлением рабочей жидкости
в зависимости от требуемого угла наклона силовой характеристики kg:
 (4)
(4)
По результатам моделирования установлена
зависимость требуемого угла наклона силовой статической характеристики РУ от
момента сопротивления повороту управляемых колес:
 (5)
(5)
где a и b - постоянные коэффициенты.
Для использования
полученной зависимости при разработке новых автомобилей и модернизации
существующих проведена оценка влияния конструкционных факторов на параметры
предложенной зависимости. Выбор факторов проведен на основе оценки их
значимости по результатам моделирования. К исследованию приняты: передаточное
число РМ; площадь поршня силового цилиндра, коэффициент сопротивления уводу,
полная масса автомобиля.
На основе регрессионного анализа получены
зависимости для расчета рациональных значений коэффициентов a и b уравнения.
При этом критерием рациональности служила максимальная площадь на зависимости jy
-j (рис 1) ограниченная
кривой Ki=0.4.
Математические модели для расчета
коэффициентов a и b представлены в виде полиномов первого порядка:
![]() (6)
(6)
![]() (7)
(7)
Погрешность полученных зависимостей не
превышает 7 % при уровне доверительной вероятности 90 %. Установлены
рациональные значения коэффициентов a и b для трехосных полноприводных
автомобилей полной массой 7 -15 тонн: a = 18 - 30 и b = 670-915.
|
|
Рисунок 2 - Зависимость коэффициента
информативности предлагаемого РУ для автомобиля Урал - 4320 от коэффициента
сцепления и бокового ускорения |
Изменение коэффициента информативности
предлагаемого РУ для автомобиля Урал - 4320 (a=26, b=750) в зависимости от
коэффициента сцепления и бокового ускорения представлено на рис. 2.
Анализ полученной зависимости позволяет
сделать вывод о том, что РУ с регулированием реактивного действия обеспечивает
улучшение информативности РУ по усилию на РК при малых величинах бокового
ускорения и низком коэффициенте сцепления шины с опорной поверхностью. Диапазон
значений коэффициента сцепления, обеспечивающий информативность РУ по усилию на
РК, увеличился в среднем на 32 %, а диапазон боковых ускорений в среднем на
48%.
Литература:
1. Мурог, И.А. Необходимость
и возможность модернизации существующего парка автомобилей многоцелевого
назначения / И.А. Мурог // Вестник Академии военных наук №3 (32) – М.: ВИ, 2010 г
2. Мурог, И.А. Повышение эффективности колесных
машин на основе принципа комбинированного управления распределением мощности / И.А.Мурог, Келлер А.В., Кокшин А.Ю., Торопов А.Н.// Проектирование колесных машин: Материалы Всерос. научно-технической
конференции посвященной 70-летию факультета «Специальное машиностроение» МГТУ
им. Н.Э.Баумана – М.: Изд-во МГТУ им. Н.Э.Баумана, 2010.